Motion Capture CS418 Interactive Computer Graphics John C. Hart - PowerPoint PPT Presentation
Motion Capture CS418 Interactive Computer Graphics John C. Hart Flexible Body Animation Need same number and configuration of vertices at key frames for intervening frames to make sense Need to have correspondences between two
Motion Capture CS418 Interactive Computer Graphics John C. Hart
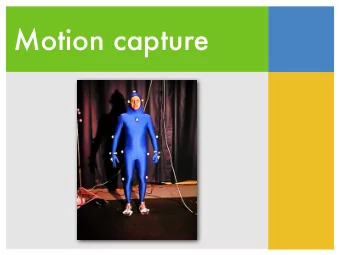
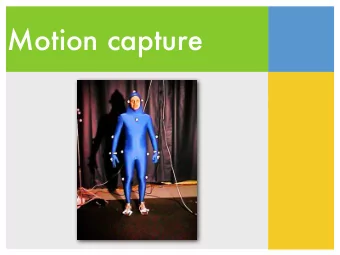
Flexible Body Animation • Need same number and configuration of vertices at key frames for intervening frames to make sense • Need to have correspondences between two collections of vertices Motion Capture • Place fiducial markers (e.g. ping pong balls) on a real-world object • Capture 3-D pose of markers at key frames • Use motion of markers to deform model A motivating example from: Sederberg & Greenwood, A Physically- Based Approach to 2-D Shape Blending, Proc. SIGGRAPH 92
Place Fiducial Markers
Create Bone Model Endpoint positions based on geometric combinations of fiducial marker positions
Create Bone Model
Measure Joint Angles θ 1 θ 2 θ 3 θ 4
Fit New Pose θ 1 θ 2 θ 2 θ 4 θ 3 θ 4 θ 3 θ 1
Joint Angles = Pose θ 1 θ 2 θ 2 θ 4 θ 3 θ 4 θ 3 θ 1
Model Shape from Bones θ 1 θ 2 θ 2 θ 4 θ 3 θ 4 θ 3 θ 1
Model Shape from Bones θ 1 θ 2 θ 2 θ 4 θ 3 θ 4 θ 3 θ 1
Motion Retargeting θ 2 θ 1 θ 2 θ 4 θ 3 θ 1 θ 3 θ 4
Simple Inverse Kinematics Given target point ( x , y ) in position space, what are the parameters ( θ , φ ) in configuration space that place the hand on the target point? (0,0) ( x , y ) φ θ b a
Simple Inverse Kinematics Use Law of Cosines to find θ d 2 = a 2 + b 2 – 2 ab cos θ cos θ = ( a 2 + b 2 – d 2 )/2 ab cos θ = ( a 2 + b 2 – x 2 – y 2 )/2 ab d (0,0) ( x , y ) α θ b a
Simple Inverse Kinematics Use Law of Cosines to find α cos α = ( a 2 + d 2 – b 2 )/2 ad cos α = ( a 2 + x 2 + y 2 – b 2 )/2 ad d (0,0) ( x , y ) α θ b a
Simple Inverse Kinematics Use arctangent to find β then φ β = atan2( y , x ) φ = α – β β (0,0) ( x , y ) φ θ b a
Simple Inverse Kinematics • Only works for single joint • Always planar because only three points • Works great for elbows, knees, etc. (0,0) ( x , y ) φ θ b a
Recommend






![NSCH phase field (mass fraction) c : J G [ 0 , 1 ] fluid moves with velocity u : J](https://c.sambuz.com/1066641/nsch-s.webp)
More recommend
Explore More Topics
Stay informed with curated content and fresh updates.