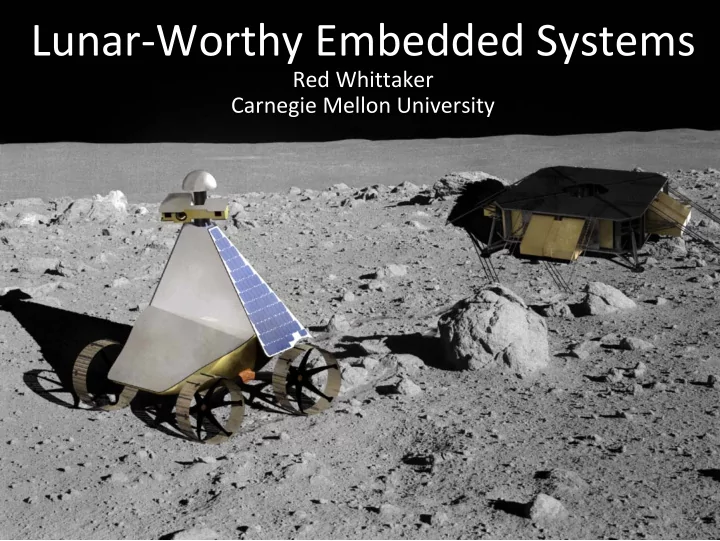
Lunar ‐ Worthy Embedded Systems Red Whittaker Carnegie Mellon University 1
Exascale Atom InertiaDot 2 SSD
Embedded Systems in Motion
Single Cores
5 25 Years of I ntel I nside
Early Motivation was Hazard
7
8
9 8086 with interprocessor comm
10
11 Robots at Work
286 Boards
13
14 The Need for Speed
15 Perception
Planning
17 GPS and Communication Denial
18
19
20
Why Grand Challenges? Grand Challenges •Raise all ships •Transform belief •Create Enterprise •Discover 21
22 Kasparov defeated by Computer
23
24 Urban Driving with multi-cores
25
Prize: Land Drive Send TV Bonus prizes: Travel 5 km Visit Apollo Survive night Find Water 26
Mission Fairing First Stage Separation Separation De ‐ orbit and Braking Launch Descent Trans ‐ Lunar Injection Earth Orbit Lunar Orbit Lunar Orbit Insertion Second Stage Separation
Spacecraft Wet Mass: 2000kg Surface Mass: 672kg Rover: 60kg Auxiliary payload: ~100kg 2.6m (D) x 2.9m (H) Six OX/Methane thrusters Monopropellant attitude control
Sensors • 2 Sun Sensors • 2 Earth Sensors • Star Tracker • Inertial Measurement Unit • Radar Altimeter 30
Sensors • 2 Sun Sensors • 2 Earth Sensors • Star Tracker • Inertial Measurement Unit • Radar Altimeter 31
Sensors • 2 Sun Sensors • 2 Earth Sensors • Star Tracker • Inertial Measurement Unit • Radar Altimeter 32
Sensors • 2 Sun Sensors • 2 Earth Sensors • Star Tracker • Inertial Measurement Unit • Radar Altimeter 33
Sensors • 2 Sun Sensors • 2 Earth Sensors • Star Tracker • Inertial Measurement Unit • Radar Altimeter 34
Rover • Mass: 60kg • 120W Solar Array • 273Wh Battery • Chain ‐ Driven four ‐ wheel drive • Skid Steering • Motorized Actuators: – 2 drive – 2 mast pan/tilt – 3 Zoom Camera 35
Mobility • Actuators: – Brushless motor – Planetary primary gearing – Harmonic final drive • 4 Wheel Chain Drive • Speed: 5 cm/s • Skid Steering • Body Differencing 36
Wheels 37
Hot and Cold Thermal Regulation Freeze-tolerant Batteries 38
Cameras • Two HD Stereo cameras • One HD Telephoto Camera – Zoom – Focus – Iris • Pan & Tilt 39
Communication • Bandwidth – Primary: 40 kbps – Secondary: 1.0 Mbps • Frequency: S ‐ Band • Antenna: Evolved • Transmitter Power: 35 watts • RF power out: 10 watts 40
Elevation Power 41 h t u m i z A Power
Solid State Drive • Memory essential for HD Video store/forward • Tolerates shock • Tolerates vacuum • Corrects for error • Endures cold
ATOM Processor endures cold
44 World’s Smallest 6-Axis Motion Sensor I nertiaDot
Molecule M ulti-Atom O peration for L ong-term E ndurance of C omputing U nder L unar E xtremes
Exascale and RTOS 46
Testing • Electronics thermal, shock, vacuum and radiation • Software and system • Communication bandwidth, delay and teleoperation • Mission rehearsals 47
48 4
49 49 ExascaleE Atome SSDSolid State Drive I I I nertiaDot ot
50
51
52
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries