Hands-on Intro To Developing Vision and LiDAR Classifier Formula Student Driverless Workshop powered by
Introduction Sibo Zhu Zhijian Liu Haotian Tang ▪ Perception Lead at ▪ Perception Lead at ▪ Perception Lead at MIT Driverless MIT Driverless MIT Driverless ▪ Research Assistant at ▪ PhD student at MIT ▪ PhD student at MIT MIT HAN Lab HAN Lab HAN Lab https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020 2
Introduction https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020 3
Vision Perception Task Wide Angle Wide Angle VIO VIO Camera Camera Camera Camera Stereovision Pair Stereovision Pair https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020 4
System Requirement ▪ Latency ▪ Maximum view-to-actuation time for emergency stop from top speed during an acceleration run ▪ Mapping Accuracy ▪ Driven by downstream mapper ▪ Horizontal Field-of-View (FOV) ▪ perceive landmarks on the inside apex of a hairpin turn ▪ Look-ahead Distance ▪ depends on the full-stack-latency and vehicle deceleration rate https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020 5
Depth Estimation Step2 Step3 ` ` ` Mono Step 1 ` ` ` Ankit. et al. IV’19 Keypoints Detection Perspective-n-Point (PnP) Step2 Stereo Object Detection + Stereo Matching Algorithm Al https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020 6
Hands-on Tutorial To Train Your Own Cone Detection Network colab.research.google.com https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020 30.08.2020 7
Colab Tutorial : colab.research.google.com https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020 8
Software Design - Keypoints Detection ▪ Detects seven keypoints on each YOLOv3 detection ▪ A residual NN that leverages the geometric relationship between keypoints ▪ Seven detected key points will be then used in a Perspective-n-Point (PnP) to get depth https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020 30.08.2020 9
Hands-on Tutorial To Train Your Own Keypoints Detection Network colab.research.google.com https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020 30.08.2020 10
Colab Tutorial : colab.research.google.com https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020 11
Validation - Accuracy https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020 30.08.2020 12
Validation - Latency Open Sourced here: github.com/cv-core https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020 30.08.2020 13
Beyond This Computer Vision Tutorial… ▪ Change the object detection backbone from YOLOv3 to YOLOv4/ EfficientNet/etc ▪ Adding temporal information for more stable and accurate detection ▪ Temporal Shift Module: hanlab.mit.edu/projects/tsm/ ▪ Inference with TensorRT in C++ ▪ Open sourced here: github.com/cv-core ▪ Prune the full YOLO architecture for cone detection task ▪ Quantization (int8) for even faster inference https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020 30.08.2020 14
LiDAR Perception https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020 30.08.2020 15
Thank you for your attention https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020 16
Hands-on Intro to Developing Vision and LiDAR Classifiers Formula Student Driverless Workshop powered by
Speaker Introduction Sibo Zhu Zhijian Liu Haotian Tang ▪ RA at MIT HAN Lab ▪ PhD student at MIT ▪ PhD student at MIT ▪ Perception Lead at ▪ Perception Lead at ▪ Perception Lead at MIT Driverless MIT Driverless MIT Driverless https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020
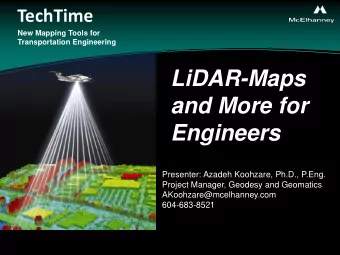
LiDAR Perception Song Han Feb 22, 2018 3D LiDAR Sensor 3D Point Cloud 500k+ points: (x, y, z, intensity) https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020
LiDAR Perception Task Velodyne 32C LiDAR https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020
Autonomous Racing Vehicle: Objectives Low Latency High Accuracy (Drive Faster) (Prevent Collisions) https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020
Autonomous Racing Vehicle: Challenges Self-Driving Cars A whole trunk of computers! We need more efficient algorithms that do not consume intensive computations. https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020
Autonomous Racing Vehicle: Challenges Fewer Laser Fewer Longer Distance Rings on Objects Laser Points Too many Laser Too many Shorter Distance Rings on Objects Laser Points https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020
Efficient LiDAR Perception: Bottleneck Bandwidth (GB/s) Sequential Memory Access 668 8 20x slower 167 30 Random Memory Access 8 Mult and Add SRAM MemoryDRAM Memory Off-chip DRAM access is much Random memory access is more expensive than inefficient due to the potential arithmetic operation! bank conflicts! https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020
Voxel-Based Models: Cubically-Growing Memory 8 0 128 x 128 x 128 resolution 83 GB (Titan XP x 7 ) GPU Memory (GB) 7% information loss 6 0 4 64 x 64 x 64 resolution 0 11 GB (Titan XP x 1 ) 42% information loss 2 0 3D ShapeNets [CVPR’15] 0 VoxNet [IROS’15] 20 40 60 80 100 120 3D U-Net [MICCAI’16] Voxel Resolution https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020
Point-Based Models: Sparsity Overheads DGCNN PointCNN SpiderCNN Ours 95,1 57,4 51,8 51,5 45,3 36,3 27,0 Runtime (%) 15,6 12,2 PointNet [CVPR’17] 4,9 2,9 0,0 PointCNN [NeurIPS’18] Irregular Access Dynamic Kernel Actual Computation DGCNN [SIGGRAPH’19] https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020
Point-Voxel Convolution (PVConv) Voxelize Convolve Devoxelize Fuse Normalize Multi-Layer Perceptron https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020
Point-Voxel Convolution (PVConv) Multi-Layer Perceptron Point-Based Feature Transformation (Fine-Grained) https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020
Point-Voxel Convolution (PVConv) Voxel-Based Feature Aggregation (Coarse-Grained) Voxelize Convolve Devoxelize https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020
Point-Voxel Convolution (PVConv) Voxel-Based Feature Aggregation (Coarse-Grained) Voxelize Convolve Devoxelize Fuse Normalize Multi-Layer Perceptron Point-Based Feature Transformation (Fine-Grained) https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020
Low Resolution with Constrained Memory Original Scene Downsampled Scene https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020
Sparse Point-Voxel Convolution (SPVConv) Sparse Voxelize Devoxelize Convolution ×N Sparse Convolution Branch Fuse Multi-Layer Perceptron Point Branch https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020
Sparse Point-Voxel Convolution (SPVConv) Sparse Voxelize Devoxelize Convolution ×N Sparse Convolution Branch Fuse Multi-Layer Perceptron Point Branch https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020
Designing Efficient 3D Modules (SPVConv) trunk traffic sign trunk person cyclist person https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020
Searching Efficient 3D Architectures (3D-NAS) Dynamic ResBlock Dynamic ResBlock Elastic Trans. Channel Elastic Res. Channel Elastic Res. Channel … Elastic Mid. Channel Elastic Mid. Channel Elastic Res. Channel Elastic Res. Channel Sparse Voxelize Devoxelize Convolution ×N Sparse Convolution Branch Fuse Multi-Layer Perceptron Point Branch https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020
Searching Efficient 3D Architectures (3D-NAS) Dynamic ResBlock Dynamic ResBlock Elastic Trans. Channel Elastic Res. Channel Elastic Res. Channel … Elastic Mid. Channel Elastic Mid. Channel Elastic Res. Channel Elastic Res. Channel Sparse Voxelize Devoxelize Convolution ×N Sparse Convolution Branch Fuse Multi-Layer Perceptron Point Branch https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020
Searching Efficient 3D Architectures (3D-NAS) Dynamic ResBlock Dynamic ResBlock Elastic Trans. Channel Elastic Res. Channel Elastic Res. Channel … Elastic Mid. Channel Elastic Mid. Channel Elastic Res. Channel Elastic Res. Channel Sparse Voxelize Devoxelize Convolution ×N Sparse Convolution Branch Fuse Multi-Layer Perceptron Point Branch https://fsg.one/academy Author: Sibo Zhu, Zhijian Liu, Haotian Tang 30.08.2020
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries