H aptic Perceptio n System F o r R o bo tic Tele-Manipulatio n - PDF document
INES 2002 6th International Conference on Intelligent Engineering Systems May 26-28, 2002, Opatija, Croatia H aptic Perceptio n System F o r R o bo tic Tele-Manipulatio n Emil M. Petriu (1) , Thom E. Whalen (2) , and Voicu Z. Groza (1)
INES 2002 6th International Conference on Intelligent Engineering Systems May 26-28, 2002, Opatija, Croatia H aptic Perceptio n System F o r R o bo tic Tele-Manipulatio n Emil M. Petriu (1) , Thom E. Whalen (2) , and Voicu Z. Groza (1) (1) University of Ottawa, Canada (2) Communications Research Centre Canada, Ottawa, ON, Canada Sensing and Modelling Research Laboratory Sensing and Modelling Research Laboratory University of Ottawa University of Ottawa SMRLab SMRLab School of Information Technology and Engineering - School of Information Technology and Engineering
The Human Haptic Perception The haptic perception is a complex exploratory act integrating two distinct modes: (i) a cutaneous tactile sensor provides information about contact force, contact geometric profile and the temperature of the touched object, (ii) a kinesthetic sensory system provides information about the positions and velocities of the kinematic structure (e.g. hand) carrying the tactile sensor. There are various cutaneous mechanoreceptors located in the outer layers of the skin. These receptors are specialized nervous cells or neurons. The free nerve endings are the most numerous and play an active role in the perception of pain, cold and warmth. These mechanoreceptors have preferential frequency response characteristics: the highest sensitivity for the Pacinian Corpuscles ( PC ) units is around 250 - 300 Hz but they respond from 30 Hz to very high frequencies. The Rapidly Adapting ( RA ) units effective frequency range is between 10 and 200 Hz, with more sensitivity below 100 Hz. The Slowly Adapting ( SA ) units respond at low frequencies, under 40 - 50 Hz. The human kinesthetic function has a much lower frequency band.
Head Mounted Display Head Mounted Display Head Mounted Display Haptic Haptic Haptic Feedback Feedback Feedback Virtual model Virtual model Virtual model of the object of the object of the object manipulated manipulated manipulated in the physical in the physical in the physical world world world Video Video Video Camera Camera Camera Robot Robot Robot Arm Arm Arm Tactile Tactile Tactile Tactile Sensors Sensors Sensors Sensors Manipulated Object Manipulated Object Manipulated Object Video and haptic virtual reality interfaces allow a human operator to remotely control a robot manipulator equipped with video camera and tactile sensors.
System Architecture The experimental robotic telemanipulation system has a bilateral architecture aiming to couple the human operator and the telerobotic manipulator as transparently as possible. Using a Head Mounted Display for augmented visual virtual reality and a haptic feedback system, the human operator controls the operation of a remote robot manipulator equipped with video camera and tactile sensors placed in robot’s hand. The tactile sensors provide the cutaneous information at the remote robotic operation site. The joint sensors of the robot arm provide the kinesthetic information . A tactile human-computer interface provides the cutaneous feedback allowing the human operator to feel with his/her own sense of touch the same sensation as that acquired by the remote robot hand from its artificial tactile sensor. A robot-like kinematic structure provides the kinesthetic feedback for the haptic human-computer interface.
Head Mounted Display Multi Sensor Data Fusion Sensory data gathered from vision, joint encoders, and tactile sensors are integrated in a unique framework which allows one to deal in a common way with all the properties of the manipulated object, These include the object’s 3D geometr/shape, its surface-material properties, and the contact forces occurring during object handling by the robot. This framework also solves sensor redundancy problems occurring when more sensors than actually required are used to measure a given object parameter.
The multi-sensor data fusion system has a hierarchical architecture based on the NASA/NBS standard reference model for telerobot control]. This architecture has an ascending sensory processing path in parallel with a descending task-decomposition control path connected via world models at each level . The processing time at each level is reduced by the use of a priori knowledge from the world model that provides predictions to the sensory system. The use of a world model promotes modularity because the specific information requirements of the sensory and control hierarchies are decoupled. The time clutch concept is used to disengage synchrony between operator specification time and telerobot operation time during path specifications. In order to avoid fatal errors and reduce the effect of the communication delay, we are using a distributed virtual environment allowing to maintain a shared world model of the physical environment where the telemanipulation operation is conducted]. Another critical requirement is the need to maintain the synchronism between the visual and the haptic feedback. While being two distinct sensing modalities, both haptic perception and vision measure the same type of geometric parameters of the 3D objects that are manipulated.
Haptic Sensors for the Robot Manipulator The robotic manipulator consists of a 5-axis commercial robot, an instrumented passive-compliant wrist and a 16-by-16 tactile probe. Position sensors placed in the robot’s joints and on the instrumented passive-compliant wrist provide the kinesthetic information.
Instrumented passive compliant wrist for tactile exploration of objects. The compliant wrist allows the robot-hand equipped with tactile sensors to accommodate the constraints of the explored object surface and thus to increase the amount of cutaneous tactile information.
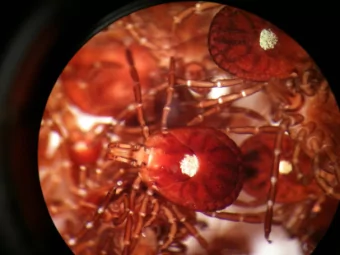
The FSR sensor array with the tab-shaped elastic overlay on top The tactile probe is based on a 16-by-16 matrix of Force Sensing Resistor (FSR) elements spaced 1.58 mm apart on a 6.5 cm2 (1 square inch) area. The FSR elements exhibit exponentially decreasing electrical resistance with applied normal force: the resistance changes by two orders of magnitude over a pressure range of 1 N/cm2 to 100 N/cm2.
The elastic overlay has a protective damping effect against impulsive contact forces and its elasticity resets the transducer system when the probe ceases to touch the object. However, they may cause considerable blurring distortions in the sensing process if they are not properly controlled. We avoided it by replacing the one-piece pad with a custom-designed elastic overlay consisting of a relatively thin membrane with protruding round tabs. This construction allows the material to expand without any stress in the x and y directions making possible its compression in the z direction proportionally with the normal stress component. The tabs are arranged in a 16-by-16 array Having a tab on top of each node of the FSR matrix. This tab configuration provides a de facto spatial sampling, which reduces the elastic overlay's blurring effect on the high 2D sampling resolution of the FSR transducer. Experimental results Illustrating the positive effect of the tab-shaped overlay. 16-by-16 median filtered tactile image of a washer.
Haptic Feedback to the Human Operator H R U O M B A O N T TS TM TS TM - - H H A A N N D D TACTILE TACTILE SENSATION IMAGE RECONSTRUCTION ACQUISITION TM = Tactile Monitor TS = Tactile Sensor A tactile monitor placed on the operator's palm allows the human to virtually feel by touch the object profile measured by the tactile sensors placed in the jaws of the robot gripper.
Cutaneous tactile monitor developed at the University of Ottawa in the early 90s. It consists of an 8-by-8 array of electromagnetic vibrotactile stimulators. The active area is 6.5 cm2 (same as the tactile sensor). Each stimulator corresponds to a 2-by-2 window in the tactile sensor array. The vibrotactile stimulators are used as binary devices that are activated when at least two of the corresponding taxels (tactile elements) in the sensor array window are "on". The figure shows a curved edge tactile feedback .
Commercial “Virtual Hand Toolkit for CyberGlove/Grasp” providing the kinesthetic human-computer interface Sensing and Modelling Research Laboratory Sensing and Modelling Research Laboratory University of Ottawa University of Ottawa SMRLab SMRLab School of Information Technology and Engineering School of Information Technology and Engineering -
Recommend



More recommend
Explore More Topics
Stay informed with curated content and fresh updates.