
From control of networks to networked control Wing Shing Wong - PowerPoint PPT Presentation
From control of networks to networked control Wing Shing Wong Department of Information Engineering The Chinese University of Hong Kong Objective: Explore impacts of recent Internet development on network control and networked control
From control of networks to networked control Wing Shing Wong Department of Information Engineering The Chinese University of Hong Kong
Objective: Explore impacts of recent Internet development on network control and networked control problems Partially based on joint works with: LO Yuan- Hsun, ZHANG Yijin, CHEN Yi, LIU Zhongchang, LIU Fang, Luo Jingjing, TAN Cheng and others. 2
Talk outline 1. Recent Internet developments 2. Routing and scheduling on the fat-tree topology 3. Network control on fat-tree networks 4. Implication on networked control
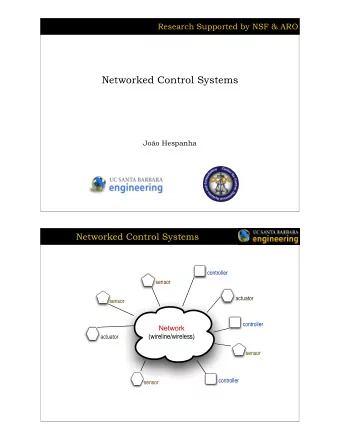
Networked control over an open network Open communication network Network of decision-makers (agents) Physical network
Two recent trends in the Internet • SDN – Software Defined Networks • Growth of mega-sized data center networks
Good ideas don’t die: Clos Networks C. Clos, “A study of non-blocking switching networks,” The Bell System Technical Journal , 1953. Three stage network, intended for crossbar switches Western Electric 100-point six-wire Type From C Clos, “A study of non -blocking B crossbar switch Switching networks,” BSTJ 1952.
A typical three-layer Clos network 𝑜 2 output links 𝒐 𝒐 𝒐 𝒐 … … … … … 𝟑 𝟐 𝒐 𝒔 × 𝒐 n- 𝟐 Rearrangeably non- blocking … 𝟑 𝑠 𝟐 𝒐 × 𝒐 r −𝟐 Condition: 𝑠 ≥ 𝑜 … 𝟑 𝟐 𝒐 𝒐 × 𝒔 n- 𝟐 𝑜 2 input links 𝒐 𝒐 𝒐 𝒐 … … … …
Fat-tree, a popular architecture for data center networks • The fat-tree is a folded version of a Clos network: an example involving 4 PODs Core Aggregate Edge hosts POD 1 POD 2 POD 3 POD 4 Based on Mohammad Al- Fares et.. Al., “A Scalable, Commodity Data Center Network Architecture”, SIGCOMM’ 08, August 17 – 22, 2008, Seattle, Washington, USA
Fat-tree network architecture • 𝐔 𝑜 : 𝑜 -ary fat-tree network – each switch/router has 2𝑜 ports and there are 2𝑜 PODs. • 𝑑 𝑗,𝑘 : the 𝑘 -th core switch in the 𝑗 -th core group. 𝐷 𝑜 = 𝑜 2 . • 𝑏 𝑗,𝑘 : the 𝑘 -th aggregation switch in the 𝑗 -th pod. 𝐵 𝑜 = 2𝑜 2 . • 𝑓 𝑗,𝑘 : the 𝑘 -th edge switch in the 𝑗 -th pod. 𝐹 𝑜 = 2𝑜 2 . • 𝑑 𝑗,𝑘 : the 𝑘 -th host in the edge switch 𝑓 𝑢,𝑗 . 𝐼 𝑜 = 2𝑜 3 . • With 256 ports per switch, system can support 4,194,304 hosts
Difference in application scenarios Then Now Switch fabric Interconnect Circuit switch Circuit/packet switch No inside buffering Buffering inside network Blocking Blocking/Queueing delay Single rate Single and Multi-rate Undivided connection Undivided and divided Dynamic, Static, centralized control centralized/distributed control No priority class Priority class possible
Basic routing and scheduling issues on fat-tree networks 11
Global packing number of a network • A basic issue is to understand “bandwidth” requirement for a given traffic pattern. • If two or more connections use the same link at the same time then there will be blocking or queuing unless the link can be shared by techniques such as multiple wavelengths (under WDMA) or multiple time slots (under TDMA). • Roughly, the minimal number of wavelengths or time slots required in order to satisfy a given traffic demand without blocking or queueing is the global packing number (GPN).
A toy example • 𝑂 = 1,2,3,4 , Φ 𝐻, 𝑂 = 3: • Assume uniform traffic • Global packing number can understood as the minimum: – Wavelengths required in an optical network – Time slots to ensure zero-queuing delay
A toy example • 𝑂 = 1,2,3,4 , Φ 𝐻, 𝑂 = 3: • Assume uniform traffic • Global packing number can understood as the minimum: – Wavelengths required in an optical network – Time slots to ensure zero-queuing delay
A toy example • 𝑂 = 1,2,3,4 , Φ 𝐻, 𝑂 = 3: • Assume uniform traffic • Global packing number can understood as the minimum: – Wavelengths required in an optical network – Time slots to ensure zero-queuing delay
GPN for two types of traffic • Theorem (Lo Zhang Chen Wong Fu preprint): For any integer, 𝑜 > 1, the global packing number for uniform traffic is 2𝑜 3 − 1. • The construction makes use of Latin square. • Consider a general integer-valued matrix, 𝐵 ∈ ℤ 2𝑜 3 ×2𝑜 3 , for example: 0 2 ⋯ 7 1 3 0 ⋯ 6 5 ⋮ ⋮ ⋱ ⋮ ⋮ ⋯ 8 5 9 0 ⋯ 1 2 3 2
Result for a general traffic matrix • Define an induced bipartite multigraph, 𝐶 𝐵 = (𝑌 ∪ 𝑍, 𝐹) where 𝑌 = 𝑍 = 2𝑜 3 and the multiplicity of an edge from node 𝑌 𝑗 to node 𝑍 𝑘 is 𝐵 𝑗,𝑘 . • Nodes represent the hosts and edges represent the traffic between host pairs. • Use different color of the edge to represent the aggregate switches used in a POD.
Result for a general traffic matrix • Define an induced bipartite multigraph, 𝐶 𝐵 = (𝑌 ∪ 𝑍, 𝐹) where 𝑌 = 𝑍 = 2𝑜 3 and the multiplicity of an edge from node 𝑌 𝑗 to node 𝑍 𝑘 is 𝐵 𝑗,𝑘 . • Nodes represent the hosts and edges represent the traffic between host pairs. • Use different color of the edge to represent the aggregate switches used in a POD.
Result for a general traffic matrix • Theorem (Chen Wong Lo Zhang preprint): The global packing number for traffic 𝐵, 𝜚 𝐔 𝑜 , 𝐼 𝑜 , 𝐵 = 𝜓 𝐶 𝐵 , where 𝜓 is the chromatic index. In particular, 𝐼 𝑜 𝐼 𝑜 𝜚 𝐔 𝑜 , 𝐼 𝑜 , 𝐵 = max max 𝐵 𝑗𝑘 , max 𝐵 𝑗𝑘 . 𝑗 𝑘 𝑘=1 𝑗=1
Network control on fat-tree networks: Stability and delay analysis 20
Analytical results for switches • Extensively studied for switches, Input-Queued Switches and Output-Queued Switches • Throughput is limited by Head-of-line (HOL) problem which can be addressed by Virtual Output Queueing (VOQ) • Scheduling is mapped to a bipartite graph matching problem by maximum size matching ( 𝑃(𝑂 5/2 ) complexity) or by maximum weight matching • Only maximum weight matching is throughput optimal (Tassiulas, Ephremides, Kumar, Meyn, McKeown, Anantharam, Walrand, and others.)
Analytic model and throughput optimality Output nodes Input nodes Virtual output queues 𝜇 𝑗,𝑘 • At each time slot, either 0 or 1 packet arrives at each input • Stationary, ergodic arrivals with input node 𝑗 to output node 𝑘 traffic rate = 𝜇 𝑗,𝑘 . • Each node or link can route at most one packet per slot • The arrivals are admissible if 𝜇 𝑗,𝑘 < 1 and 𝜇 𝑗,𝑘 < 1 for all 𝑗, 𝑘 𝑗 𝑘 • A schedule is throughput optimal if it stabilizes all admissible rates
A short digression: Classification of network control models using the choice-base control perspective 23
A motivating example Google’s Project Loon Loon for All Image from http://www.google.com/loon/ Locations requiring attention
Satellite positioning problem • Assuming a simple linear dynamic model 𝑀 𝑒𝑦 ∈ ℝ 4 𝑒𝑢 = 𝐵𝑦 𝑢 + 𝑐 𝑗 𝑣 𝑗 𝑢 , 𝑦(𝑢 0 ) 𝑗=1 • Agent i can select a point to preferentially serve from a given set: {𝐐 𝑗,1 , 𝐐 𝑗,2 , … 𝐐 𝑗,𝑂 𝑗 } • Assume there is a pre-agreed location depending on the selected choices, is it possible to find distributed controls that to steer the satellite according to the agents’ choices without a central coordinator?
Choice-based action system • Consider a distributed agent system with L agents: 𝑚 ∈ 𝐽 = {1, … , 𝑀} • Agent l has 𝑂 𝑚 choices 𝑗 𝑚 ∈ 𝐷 𝑚 = {1, … , 𝑂 𝑚 } • The choice combination of all agents: 𝑗 = 𝑗 1 , 𝑗 2 , … , 𝑗 𝑀 ∈ 𝐷 1 × 𝐷 2 × ⋯ × 𝐷 𝑀 ≡ 𝐷 • For each choice combination there is a target state to be reached: 𝐼 𝑗 ∈ ℝ 𝑜 • The number of targets: 𝑂 1 × 𝑂 2 × ⋯ × 𝑂 𝑀 • Represent all the targets in a tensor 𝐼 = 𝐼 𝑗 𝑂 1 ×𝑂 2 ×⋯×𝑂 𝑀
The basic questions • Assume agents select their choices with a known (uniform) distribution and the choices remain unchanged. • Can any target be reached under joint control of the agents without explicit communication (a central coordinator or agent-to-agent communication)? • If not, how much information is needed among the agents? • Two extreme cases: No communication versus full- communication – Is it possible to realize a target from a set of multiple choices with no communication between agents? – If full-communication is provided, the problem is equivalent to a collection of single target problems.
Systems with linear dynamics • Deterministic a linear system with L agents 𝑀 , 𝑦 𝑗 0 ∈ ℝ 𝑙 (∗) 𝑦 𝑗 𝑢 = 𝐵𝑦 𝑗 𝑢 + 𝐶 𝑚 𝑣 𝑚 𝑢, 𝑦 𝑗 , 𝑗 𝑚 𝑚=1 to minimize the cost function 𝑀 𝑢 𝑔 𝑈 𝑓 𝑗 𝑢 𝑔 + 𝛾 𝑈 (𝑢)𝑣 𝑚 𝑢 𝑒𝑢 𝐾 = 𝛽𝑓 𝑗 𝑢 𝑔 𝑣 𝑚 𝑗 ∈𝐷 0 𝑚=1 where 𝑓 𝑗 𝑢 𝑔 = 𝑦 𝑗 𝑢 𝑔 − 𝐼 𝑗 is the target error for the and 𝛽, 𝛾 are positive normalization factors. choice 𝑗 Definition: A target matrix is reachable if for 𝛾 = 0 , there exists controls such that 𝐾 = 0
Recommend





More recommend
Explore More Topics
Stay informed with curated content and fresh updates.