Estimation of concentration and fluxes of passive gases on the basis - PowerPoint PPT Presentation
Institute of Computational Technologies of the Siberian Branch of the Russian Academy of Sciences 6 Acad. Lavrentjev avenue 630090 Novosibirsk Estimation of concentration and fluxes of passive gases on the basis of data assimilation system
Institute of Computational Technologies of the Siberian Branch of the Russian Academy of Sciences 6 Acad. Lavrentjev avenue 630090 Novosibirsk Estimation of concentration and fluxes of passive gases on the basis of data assimilation system for Siberian region N. Kilanova , Е . Klimova, А . Zudin
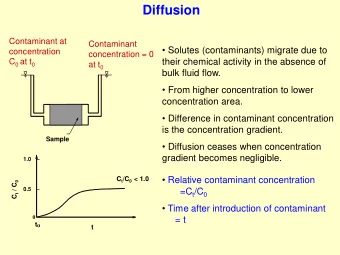
Passive pollution transport and diffusion model s s s s s s s ∂ ∂ ∂ ∂ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ∂ ∂ ∂ ∂ ∂ ∂ u v ( w w g ) k k k ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ + + + − = + + + η 1 2 3 ⎜ x ⎟ ⎜ y ⎟ ⎜ z ⎟ t x y z x y z ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠ The problem is considered in Dt=G × [0,T] , G=S × [h,H] ; S={0 ≤ x ≤ X;0 ≤ y ≤ Y}. Boundary conditions: s=s g s ∂ ( ) z=h s s ν = α − 0 z ∂ s ∂ 0 z=H ν = z ∂
Scheme of the experiment for evaluation of passive pollution concentration and emission Initial data on the concentration and emission Evaluation of the concentration and emission for the model Observational data Assimilation procedure – concentration and emission evaluation
Kalman filter algorithm f a x A x ; = k k 1 k 1 − − f a T P A P A Q = + k k 1 k 1 k 1 k 1; − − − − f T f T 1 K P M ( M P M R ) ; − = + k k k k k k k a f P ( I K M ) P ; = − k k k k a f 0 f x x K ( y M x ); = + − k k k k k k k 0,..., . K = f f t f t T a a t a t T P E x ( x )( x x ) ; P E x ( x )( x x ) . = − − = − − k k k k k k k k k k
The suboptimal Kalman filter algorithm Passive pollution transport s As = + η and diffusion model : k + 1 k k ~ ( s – passive pollution η = η η 0 = η k + 1 k concentration , η - emission ) N Forecast errors 1 f T T P s ( s ) s ( s ) = Δ Δ ≅ Δ Δ ∑ covariance matrix: i i k k k N 1 − i 1 = f t s s s Δ = − k k k
The concentration and emission in the data assimilation procedure Experiment 1 - the absolute value of emissions restores. The initial approximation of the field emission is zero. f 0 Forecast of η 0 = concentration f f f f f and emission: s As = + η η = η k k 1 k k 1 k 1 − − −
The concentration and emission in the data assimilation procedure Experiment 2 - value of the correction factor restores f f ~ ( 1 ) η = η + δη 0 0 Forecast of f ~ f ( 1 ) η = η + δη k k concentration f f f 2 and emission: 1 * δη = αδη + − α χ k k 1 k 1 − − f f f s As = + η k k 1 k 1 − − A.W.Heemink, A.J.Segers “Modeling and prediction of environmental data in space and time using Kalman filtering”, Stochastic Environmental Research and Risk Assessment 16 (2002), 225-240 ,Springer-Verlag 2002.
The concentration and emission in the data assimilation procedure t t t s As ε = + η + k k 1 k 1 k 1 “True“ field of − − − t t ~ t concentration and ( 1 ) η = η η = η + δη 0 0 0 emission: t t t t 2 t η = η 1 * δη = αδη + − α χ k k 1 − k k 1 k 1 − − o t y M s Observational data : = + ξ k k k 0
Evaluation of the concentrations and emissions: f f f f a T T 1 o − s s P M ( M P M R ) ( y M s ) = + + − k k k k k k k k k k k N 1 f T T P s ( s ) s ( s ) = Δ Δ ≅ Δ Δ ∑ k i i k k N 1 − i 1 = f f f T a T 1 o − s ( ) ( M P M R ) ( y M s ) η = η + Δ Δ η + − k k k k k k k k k f t Δ η = η − η k k k f T f f a T 1 o − s ( ) ( M P M R ) ( y M s ) δη = δη + Δ Δ δη + − k k k k k k k k k f t Δ δη = δη − δη k k k
The initial field of CO 2 Co on nc ce en nt tr ra at ti io on n f fi ie el ld d, , C Modeling data -4 4 , 0 - (( (k kg g / / k kg g) )* *1 10 , ( each pink band he ei ig gh ht t o of f 1 12 20 00 0 m m) ) h is the observational data o o E 9 o 9 o Th he e r re eg gi io on n ( (4 48 8. .9 N N, , 8 85 5. .9 E; ; T every 6 hours o o 9 o 9 o 76 6. .9 N N, , 1 10 09 E E) ) 7 http://www.gmes-atmosphere.eu/data
Estimate of the concentration CO 2 for 24 hours Co on nc ce en nt tr ra at ti io on n f fi ie el ld d, , C -4 4 , 0 - (( (k kg g / / k kg g) )* *1 10 , ( he ei ig gh ht t o of f 1 12 20 00 0 m m) ) h Ro oo ot t m me ea an n s sq qu ua ar re e e er rr ro or r f fo or r R -4 4 ) 0 - co on nc ce en nt tr ra at ti io on n, , ( (( (k kg g / / k kg g) )* *1 10 ) c
Estimate of CO 2 emission for 24 hours The initial emission field is zero f f f 0 η = η η 0 = k k 1 − f T a x ( ) * η = η + Δ Δ η k k f f T 1 o − * ( M P M R ) ( y M x ) + − k k k k k k k f t Δ η = η − η CO O 2 E Em mi is ss si io on n f fi ie el ld d, , C 2 k k k -4 4 ) 0 - (( (k kg g / / k kg g) )* *1 10 ) (
Estimate of CO 2 emission for 24 hours ~ The initial emission field is η 0 = η CO O 2 E Em mi is ss si io on n f fi ie el ld d, , Ro oo ot t m me ea an n s sq qu ua ar re e e er rr ro or r f fo or r C 2 R -4 4 ) -4 4 ) 0 - 0 - (( (k kg g / / k kg g) )* *1 10 ) em mi is ss si io on n, , ( (( (k kg g / / k kg g) )* *1 10 ) ( e
Estimate of CO 2 emission for 24 hours Ro oo ot t m me ea an n s sq qu ua ar re e e er rr ro or r f fo or r Ro oo ot t m me ea an n s sq qu ua ar re e e er rr ro or r f fo or r R R -4 4 ) -4 4 ) 0 - 0 - co on nc ce en nt tr ra at ti io on n, , ( (( (k kg g / / k kg g) )* *1 10 ), , co on nc ce en nt tr ra at ti io on n, , ( (( (k kg g / / k kg g) )* *1 10 ) c c ~ 0 η 0 = η 0 = η
Conclusions • The algorithm for the joint estimation of the passive polution concentration and emission is suggested. • Numerical experiments have shown that this algorithm reduces the root mean square error estimation of the polution concentration. • This algorithm allows to select the emission fields according to the observational data .
Thank you for your attention!
Recommend






More recommend
Explore More Topics
Stay informed with curated content and fresh updates.