EnviroTrack: Middleware system designed for object tracking . An - PDF document
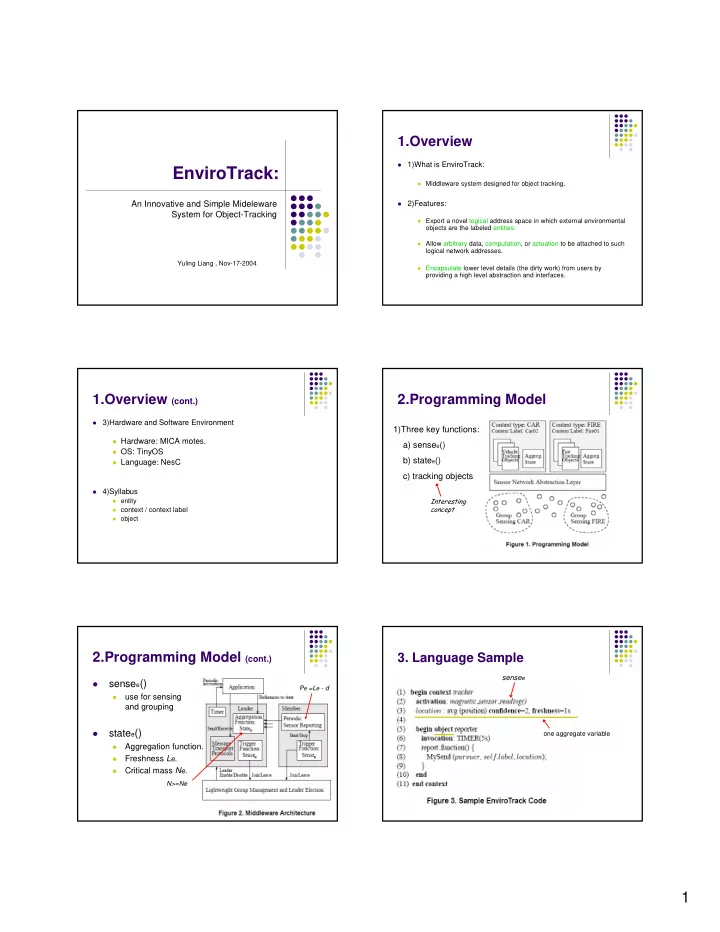
1.Overview 1)What is EnviroTrack: EnviroTrack: Middleware system designed for object tracking . An Innovative and Simple Mideleware 2)Features: System for Object-Tracking Export a novel logical address space in which external
1.Overview � 1)What is EnviroTrack: EnviroTrack: � Middleware system designed for object tracking . An Innovative and Simple Mideleware � 2)Features: System for Object-Tracking � Export a novel logical address space in which external environmental objects are the labeled entities. � Allow arbitrary data, computation, or actuation to be attached to such logical network addresses. Yuling Liang , Nov-17-2004 � Encapsulate lower level details (the dirty work) from users by providing a high level abstraction and interfaces. 1.Overview (cont.) 2.Programming Model � 3)Hardware and Software Environment 1)Three key functions: � Hardware: MICA motes. a) sense e () � OS: TinyOS b) state e () � Language: NesC c) tracking objects � 4)Syllabus Interesting � entity concept � context / context label � object 2.Programming Model (cont.) 3. Language Sample sense e sense e () � P e =L e - d use for sensing � and grouping state e () � one aggregate variable Aggregation function. � Freshness L e . � Critical mass N e . � N>=Ne 1
4. Implementation 4. Implementation (cont.) � The EnviroTrack preprocessor � The EnviroTrack preprocessor array of contexts. � The Group Management protocol handler � Routing services goes through this array activate checking if any context satisfies the activation group management condition . 4. Implementation (cont.) 4. Implementation (cont.) � The Group Management � The Group Management protocol protocol � Leader Election Randomly chooses a small timeout value. � � Entity Management Module The first time out node sends a message informing its � � 1) Create entities when an new neighbors that it is leader. * Critique : A Conflicting Scenario event occurs. � 2) Maintain the single entity and prevent spurious entities creation. � 3) Ensure nodes know when to leader candidate leader candidate join and when to create new entities. 4. Implementation (cont.) 4. Implementation (cont.) � The Group Management protocol (cont.) � Entity Management Module � Heartbeats of Group Leader � inform current members that the leader is alive � application state for new possible leader (can be adopted by A-Track) � indicate followers ( potential group members) 2
4. Implementation (cont.) 4. Implementation (cont.) entity follower � Discovery � Target Moving awareness horizon Scenario Scenario leader leader entity member entity follower entity member independent node heartbeat independent node awareness horizon 4. Implementation (cont.) 4. Implementation (cont.) new leader � Hand-Off � Hand-Off Failure Scenario Scenario awareness horizon Solution: a. Increase the awareness horizon ( need more energy) b. Track the bigger object spurious entity leader c. Use end-point filter entity member entity follower independent node heartbeat relinquish leadership awareness horizon 4. Implementation (cont.) 4. Implementation (cont.) � Radio Irregularity Failure Scenario � Routing services spurious entity Solution: � Landmark routing Introduce new variables: � Nodes are assumed to know - failed leader timer (> heartbeat period their location Leader or depend on radio Forwarding messages � signal strength ) Landmark - alive counter good point - min time alive members 3
5. Performance and Test Case 5. Performance and Test Case � Real Test � Simulation Test � Target: T-72 Tank � Target: � Testing Area: 70 km x 5 km � Testing Area: Rectangular � Number of Motes: 18,000 � Number of Motes: Unknown � Sensor Type: Magnetometer � Sensor Type: light sensor � Speed: 11.2 seconds / hop � Speed: 10 seconds/hop and 15 seconds/ hop 5. Performance and Test Case 5. Performance and Test Case (cont.) (cont.) � Reasons for Error: � no notion of proximity to the target � only using a subset of reporting sensors due to radio loss 5. Performance and Test Case 5. Performance and Test Case (cont.) (cont.) � Conclusions of Table 1: � HB loss: heartbeats lost � Msg loss: sensor messages lost during data aggregation � The system operates correctly in the presence of message loss. � Link Util: average useful link utilization � Message loss is not caused by link utilization but rather by the unreliability of the wireless medium � Communication requirements constitute only a tiny fraction of available link capacity. � Link utilization increases only slightly with tank speed meaning potential to scale well with tracking difficulty. 4
5. Performance and Test Case 5. Performance and Test Case (cont.) (cont.) � Conclusions on Trackable Speed � Conclusion on CR (Communication Radius : SR (Sensing Radius) graph The tracking speed is fast “enough“. � � Larger events are trackable The bigger target is easier to track at � fast speed at faster speed. Shorter heartbeat period � � Tracking architecture can increase tracking speed breaks down when the CR:SR ratio falls below 1 6. Critiques (cont.) 7. Q & A � leader election basing on timeout is too simple, should address energy as a � Any Questions? factor not addressing the power management problem. � Not adaptive to target speed � � did not explain what is a “landmark” the assumption of CR > SR cant always hold in many cases in real � environment Based on assumption of group management on Target are located sparsely � node identifier/weight/priority is not clearly explained � Terms are sometimes confusing. � 5
Recommend









More recommend
Explore More Topics
Stay informed with curated content and fresh updates.