
Complexity hierarchies, PERT, Mathematical programming 3. CPM/PERT - PowerPoint PPT Presentation
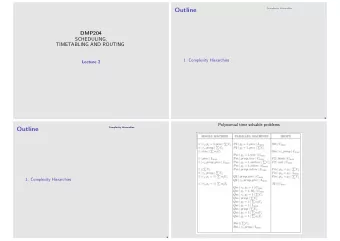
Outline DM87 SCHEDULING, TIMETABLING AND ROUTING 1. Resume Lecture 2 2. Complexity Hierarchy Complexity hierarchies, PERT, Mathematical programming 3. CPM/PERT 4. Mathematical Programming Marco Chiarandini 2 Outline Outline 1. Resume
Outline DM87 SCHEDULING, TIMETABLING AND ROUTING 1. Resume Lecture 2 2. Complexity Hierarchy Complexity hierarchies, PERT, Mathematical programming 3. CPM/PERT 4. Mathematical Programming Marco Chiarandini 2 Outline Outline 1. Resume 1. Resume 2. Complexity Hierarchy 2. Complexity Hierarchy 3. CPM/PERT 3. CPM/PERT 4. Mathematical Programming 4. Mathematical Programming 3 4
Complexity Hierarchy Problems Involving Numbers Partition ◮ Input: finte set A and a size s ( a ) ∈ Z + for each a ∈ A ◮ Question: is there a subset A ′ ⊆ A such that A problem A is reducible to B if a procedure for B can be used also for A . � � Ex: 1 || � C j ∝ 1 || � w j C j s ( a ) = s ( a )? a ∈ A ′ a ∈ A − A ′ 3-Partition Complexity hierarchy describes relationships between different scheduling problems. ◮ Input: set A of 3m elements, a bound B ∈ Z + , and a size s ( a ) ∈ Z + for each a ∈ A such that B/4 < s ( a ) < B/2 and such that Interest in characterizing the borderline: polynomial vs NP-hard problems � a ∈ A s ( a ) = mB ◮ Question: can A be partitioned into m diskoint sets A 1 , . . . , A m such that for 1 ≤ i ≤ m , � a ∈ A i s ( a ) = B (note that each A i must therefore contain exactly three elements from A )? 5 6 Complexity Hierarchy of Problems
Complexity Hierarchy Elementary reductions for machine environment http://www.mathematik.uni-osnabrueck.de/research/OR/class/ 10 Complexity Hierarchy Complexity Hierarchy of Problems Elementary reductions for regular objective functions 11
Outline Project Planning 1. Resume 2. Complexity Hierarchy 3. CPM/PERT 4. Mathematical Programming 13 14 Project Planning Project Planning 14 14
Project Planning Outline 1. Resume 2. Complexity Hierarchy 3. CPM/PERT 4. Mathematical Programming 14 15 Linear Programming Linear, Integer, Nonlinear Programming program = optimization problem f ( x ) min Linear Program in standard form g i ( x ) = 0, i = 1, 2, . . . , k h j ( x ) ≤ 0, j = 1, 2, . . . , m c 1 x 1 + c 2 x 2 + . . . c n x n min x ∈ R n a 11 x 1 + a 12 x 2 + . . . + a 1n x n = b 1 s.t. c T x min a 21 x 1 + a 22 x 2 + . . . + a 2n x n = b 2 general (nonlinear) program (NLP) Ax = b . . x ≥ 0 . c T x min a 21 x 1 + a 22 x 2 + . . . + a 2n x n = b n c T x min Ax = a x 1 , x 2 , . . . , x n ≥ 0 Ax = a Bx ≤ b Bx ≤ b x ≥ 0 x ≥ 0 ( x ∈ Z n ) ( x ∈ R n ) ( x ∈ { 0, 1 } n ) linear program (LP) integer (linear) program (IP, MIP) 16 17
Historic Roots LP Theory ◮ 1939 L. V. Kantorovitch: Foundations of linear programming (Nobel Prize 1975) ◮ Max-Flow Min-Cut Theorem The maximal (s,t)-flow in a capaciatetd network is equal to the minimal ◮ George J. Stigler’s 1945 (Nobel Prize 1982) “Diet Problem”: “the first capacity of an (s,t)-cut linear program” find the cheapest combination of foods that will ◮ The Duality Theorem of Linear Programming satisfy the daily requirements of a person Army’s problem had 77 unknowns and 9 constraints. c T x y T b max min http://www.mcs.anl.gov/home/otc/Guide/CaseStudies/diet/index.html y T A ≥ c T Ax ≤ b x ≥ 0 y ≥ 0 ◮ 1947 G. B. Dantzig: Invention of the simplex algorithm If feasible solutions to both the primal and the dual problem in a pair of ◮ Founding fathers: dual LP problems exist, then there is an optimum solution to both ◮ 1950s Dantzig: Linear Programming 1954, the Beginning of IP G. systems and the optimal values are equal. Dantzig, D.R. Fulkerson, S. Johnson TSP with 49 cities ◮ 1960s Gomory: Integer Programming 18 19 LP Theory LP Solvability ◮ Linear programs can be solved in polynomial time with ◮ Max-Flow Min-Cut Theorem the Ellipsoid Method (Khachiyan, 1979) does not hold if several source-sink relations are given Interior Point Methods (Karmarkar, 1984, and others) (multicommodity flow) ◮ Open: is there a strongly polynomial time algorithm for the solution of ◮ The Duality Theorem of Integer Programming LPs? c T x y T b max min ◮ Certain variants of the Simplex Algorithm run - under certain conditions y T A ≥ c T Ax ≤ b - in expected polynomial time (Borgwardt, 1977...) x ≥ 0 y ≥ 0 ≤ x ∈ Z n y ∈ Z n ◮ Open: Is there a polynomial time variant of the Simplex Algorithm? 20 21
IP Solvability ◮ Algorithms for the solution of nonlinear programs ◮ Algorithms for the solution of linear programs ◮ 1) Fourier-Motzkin Elimination (hopeless) ◮ 2) The Simplex Method (good, above all with duality) ◮ Theorem ◮ 3) The Ellipsoid Method (total failure) Integer, 0/1, and mixed integer programming are NP-hard. ◮ 4) Interior-Point/Barrier Methods (good) ◮ Consequence ◮ Algorithms for the solution of integer programs ◮ special cases ◮ 1) Branch & Bound ◮ special purposes ◮ 2) Cutting Planes ◮ heuristics 22 23 Algorithms for nonlinear programming Algorithms for linear programming The Simplex Method ◮ Iterative methods that solve the equation and inequality systems ◮ Dantzig, 1947: primal Simplex Method representing the necessary local optimality conditions. ◮ Lemke, 1954; Beale, 1954: dual Simplex Method ◮ Steepest descent (Kuhn-Tucker sufficient conditions) ◮ Dantzig, 1953: revised Simplex Method ◮ .... ◮ Newton method ◮ Underlying Idea: Find a vertex of the set of feasible LP solutions ◮ Subgradient method (polyhedron) and move to a better neighbouring vertex, if possible. 24 25
The simplex method The simplex method 26 26 The simplex method Algorithms for Integer Programming Hirsch Conjecture special „simple" combinatorial optimization problems Finding a: If P is a polytope of dimension n with m facets then every vertex of P can be reached from any other vertex of P on a path of length at most m-n. ◮ minimum spanning tree ◮ shortest path In the example before: m=5, n=2 and m-n=3, conjecture is true. ◮ maximum matching ◮ maximal flow through a network ◮ cost-minimal flow At present, not even a polynomial bound on the path length is known. Best upper bound: Kalai, Kleitman (1992): The diameter of the graph of an ◮ ... n-dimensional polyhedron with m facets is at most m(log n+1). solvable in polynomial time by special purpose algorithms Lower bound: Holt, Klee (1997): at least m-n (m, n large enough). 27 28
Algorithms for Integer Programs Algorithms for Integer Programs special „hard" combinatorial optimization problems ◮ traveling salesman problem ◮ location and routing ◮ set-packing, partitioning, -covering ◮ 1) Branch & Bound ◮ max-cut ◮ 2) Cutting Planes ◮ linear ordering Branch & cut, Branch & Price (column generation), Branch & Cut & Price ◮ scheduling (with a few exceptions) ◮ node and edge colouring ◮ ... NP-hard (in the sense of complexity theory) The most successful solution techniques employ linear programming. 29 30 Summary ◮ We can solve today explicit LPs with ◮ up to 500,000 of variables and ◮ up to 5,000,000 of constraints routinely in relatively short running times. ◮ We can solve today structured implicit LPs (employing column generation and cutting plane techniques) in special cases with hundreds of million (and more) variables and almost infinitely many constraints in acceptable running times. (Examples: TSP, bus circulation in Berlin) [Martin Grötschel, Block Course at TU Berlin, “Combinatorial Optimization at Work”, 2005 http://co-at-work.zib.de/berlin/ ] 31
Recommend




More recommend
Explore More Topics
Stay informed with curated content and fresh updates.