Chapter 1 Introduction Control system engineering is concerned - PDF document
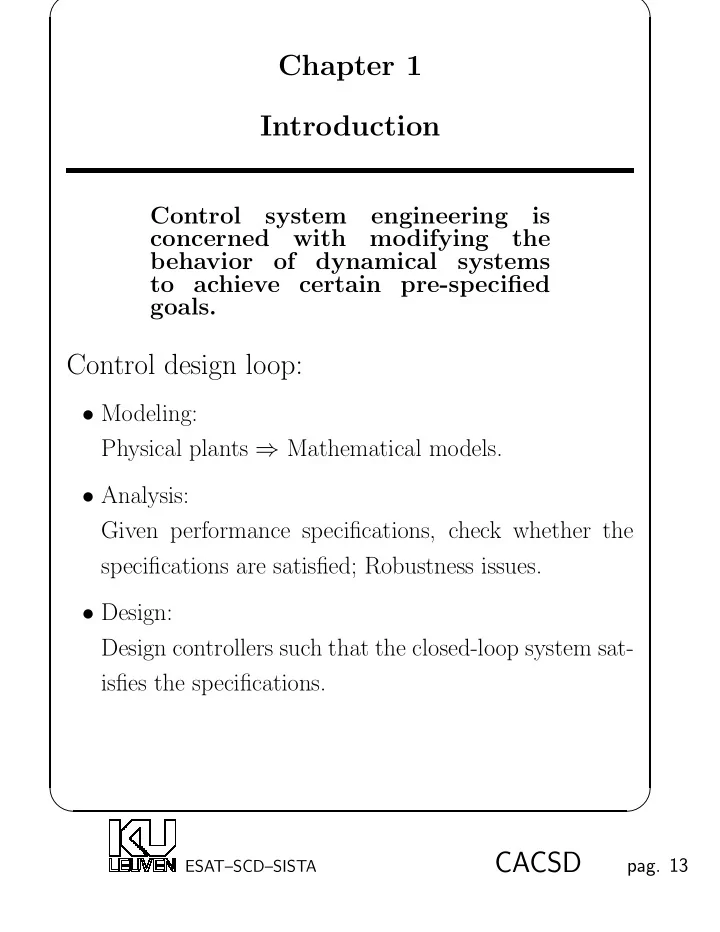
Chapter 1 Introduction Control system engineering is concerned with modifying the behavior of dynamical systems to achieve certain pre-specified goals. Control design loop: Modeling: Physical plants Mathematical
✬ ✩ Chapter 1 Introduction Control system engineering is concerned with modifying the behavior of dynamical systems to achieve certain pre-specified goals. Control design loop: • Modeling: Physical plants ⇒ Mathematical models. • Analysis: Given performance specifications, check whether the specifications are satisfied; Robustness issues. • Design: Design controllers such that the closed-loop system sat- isfies the specifications. ✫ ✪ CACSD pag. 13 ESAT–SCD–SISTA
✬ ✩ Control system design specification Plant -system “definition” Data acquisition -sensors -sampling rates -filter selection -data storage Modeling a priori -physical information -black box -system identification constraints -parameter estimation -model validation specification Control system design & analysis Controller implementation constraints (hardware) “closing the loop” yes no spec’s met? OK! ✫ ✪ CACSD pag. 14 ESAT–SCD–SISTA
✬ ✩ 3 Motivating Examples Philips Glass Tube Manufacturing Process Input 2 Mandrel Pressure 20 10 Quartz Sand 0 -10 -20 0 100 200 300 400 500 600 700 800 Mandrel Furnace Melted Glass Output 1 Diameter 0.1 0.05 0 -0.05 -0.1 0 100 200 300 400 500 600 700 800 Output 2 Thickness 0.04 Glass Tube 0.02 0 -0.02 0 100 200 300 400 500 600 700 800 Input 1 Drawing Speed 0.04 0.02 0 -0.02 -0.04 0 100 200 300 400 500 600 700 800 Control design specifications: design a controller such that the wall thickness and diameter are as constant as possible. ✫ ✪ CACSD pag. 15 ESAT–SCD–SISTA
✬ ✩ Modeling via system identification: disturbances inputs outputs Plant a priori information identification algorithms simulated predicted Mathematical Model disturbance model outputs disturbance model ✫ ✪ CACSD pag. 16 ESAT–SCD–SISTA
✬ ✩ Plot with simulation and validation results: ✫ ✪ CACSD pag. 17 ESAT–SCD–SISTA
✬ ✩ System identification toolbox • Xmath GUI identification toolbox. • Matlab Toolbox of system identification. • RaPID (some algorithms developed at ESAT/SISTA) • · · · · · · ✫ ✪ CACSD pag. 18 ESAT–SCD–SISTA
✬ ✩ After system identification, a 9th order linear discrete-time model with two inputs and two outputs was obtained: x k +1 = Ax k + Bu k + w k , y k = Cx k + Du k + v k . �� � � �� � � w k Q S w T v T = E δ kl S T R l l v k where A , B , C , D are matrices, u k is the control input and w k and v k are process noise and measurement noise respectively. Control design results: Static Ffwd Setpoint Diameter Filt 1 Diameter PIID 1 Static Plant - Decoupling Filt 2 PIID 2 Thickness Setpoint - Thickness two feedforward filters a static feedforward controller Controller = a static decoupling controller two PIID controllers ✫ ✪ CACSD pag. 19 ESAT–SCD–SISTA
✬ ✩ The two PIIDs control the decoupled loops. Parameter tuning follows from a multi-objective optimization algo- rithm. The control design loop for this application : State space model LQG Controller design Kalman filter Static feedback Hardware constraints PIID/Static decoupling Multi-objective optimization Hardware implementation ✫ ✪ CACSD pag. 20 ESAT–SCD–SISTA
✬ ✩ Quality improvement via control: Histogram of the measured diameter and thickness Diameter - No Control Thickness - No Control 300 400 300 200 200 100 100 0 0 -0.2 -0.1 0 0.1 0.2 -0.02 -0.01 0 0.01 0.02 Diameter - PIID Controlled Thickness - PIID Controlled 300 400 300 200 200 100 100 0 0 -0.2 -0.1 0 0.1 0.2 -0.02 -0.01 0 0.01 0.02 ✫ ✪ CACSD pag. 21 ESAT–SCD–SISTA
✬ ✩ Boeing 747 aircraft control: Velocity vector β x , u α θ , q y , v φ , p Rudder δ r input Elevator δ e ψ , r output Aileron z , w x, y, z = position coordinates φ = roll angle u, v, w = velocity coordinates θ = pitch angle p = roll rate ψ = yaw angle q = pitch rate β = slide-slip angle r = yaw rate α = angle of attack ✫ ✪ CACSD pag. 22 ESAT–SCD–SISTA
✬ ✩ Control specifications for lateral control: • Stability • Damping ratio ≃ 0.5 Modeling: A lateral perturbation model in horizontal flight for a nom- inal forward speed of 774 ft/s at 40.000 ft can be de- rived based on physical laws. A 4th order, linear, single- input/single-output system was obtained : x = Ax + Bu, ˙ y = Cx + Du, where − 0 . 0558 − 0 . 9968 0 . 0802 0 . 0415 0 . 5980 − 0 . 1150 − 0 . 0318 0 A = , − 3 . 0500 0 . 3880 − 0 . 4650 0 0 0 . 0805 1 . 0000 0 0 . 0073 − 0 . 4750 � � B = , C = , D = 0 , 0 1 0 0 0 . 1530 0 � T � and x = , u = δ r , y = r. β r p φ ✫ ✪ CACSD pag. 23 ESAT–SCD–SISTA
✬ ✩ Control design: The controller is a proportional feedback from yaw rate to rudder, designed based on the root-locus method. e r c r Rudder δ r Aircraft servo − K Im stable unstable Re 30 0 damping ratio = 0.5 ✫ ✪ CACSD pag. 24 ESAT–SCD–SISTA
✬ ✩ Analysis: • For good pilot handling, the damping ratio of the sys- tem should be around 0.5. The open loop system, with- out control, has a damping ratio of 0.03, far less than 0.5. With the controller, the damping ratio is 0.35, near to 0.5 : a big improvement ! • Consider the initial-condition response for initial slide- slip angle β 0 = 1 ◦ : Response at r to a small initial β 0.015 yaw rate r rad/sec 0.01 No feedback 0.005 0 −0.005 Yaw rate feedback −0.01 0 5 10 15 20 25 30 Time (secs) ✫ ✪ CACSD pag. 25 ESAT–SCD–SISTA
✬ ✩ Automobile control: CVT control R sc f secondary pulley set C sc I sc p sc N wheel k m f sc v sc Output C sc secondary 1 m c belt N engine cylinder p cl G sc q sc r r G sv q sv r 3 r 3 G sv C sv primary pulley set secondary I sv r 1 k channel m valve C sv v sv c 1 q sv C sv m 1 c 2 C ch p sv G sv q sv 1 Input R sv c r 2 r 2 N engine f q sv oil pump C k = spring constant I m = inertia R = friction resistor G r = hydraulic impedance p = pressure q = oil flow v m = velocity of a mass f = force ✫ ✪ CACSD pag. 26 ESAT–SCD–SISTA
✬ ✩ Control specifications (tracking problem): • stability, • no overshoot, • steady state error on the step response ≤ 2%, • rise time of the step response is ≤ 50ms. Modeling: A 6th order single-input/single-output nonlinear system was obtained by physical (hydraulic and mechanical) mod- eling. Controller design: The control problem is basically a tracking problem: p sv p sc e p sc 1 K P ref − A PID controller is designed using optimal and robust con- trol methods. ✫ ✪ CACSD pag. 27 ESAT–SCD–SISTA
✬ ✩ Analysis: It is required that there is no overshoot and that the rise time and steady state error of the step time response should be less than 50 ms and 2% respectively. Without feedback control: overshoot 20% with oscillation! With a PID controller: no overshoot, rise time is less than 30ms, no steady-state error. Step (from 40 bar to 20 bar) responses: Step responses 45 40 35 Pressure (bar) 30 with a PID controller 25 20 no feedback control 15 0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1 Time:sec. ✫ ✪ CACSD pag. 28 ESAT–SCD–SISTA
✬ ✩ General Control Configuration uncertainty C ff process ∆ noise time delay dist. d w ref. e e u e-Ts C con 1 C pre G - Plant sensor C con 2 S y sensor noise v ✫ ✪ CACSD pag. 29 ESAT–SCD–SISTA
✬ ✩ Systems and Models • Linear - Nonlinear systems A system L is linear ⇔ if input u 1 yields output L ( u 1 ) and input u 2 yields out- put L ( u 2 ), then : L ( c 1 u 1 + c 2 u 2 ) = c 1 L ( u 1 ) + c 2 L ( u 2 ) , c 1 , c 2 ∈ R In this course, we only consider linear systems. • Lumped - distributed parameter systems Many physical phenomena are described mathemati- cally by partial differential equations (PDEs). Such sys- tems are called distributed parameter systems. Lumped parameter systems are systems which can be described by ordinary differential equations (ODEs). Example : – Diffusion equation → discretize in space – Heat equation In this course, we only consider lumped parameter sys- tems. ✫ ✪ CACSD pag. 30 ESAT–SCD–SISTA
✬ ✩ • Time invariant - time varying systems A system is time varying if one or more of the param- eters of the system may vary as a function of time, otherwise, it is time invariant. Example: Consider a system M d 2 y dt + F dy dt + Ky = u ( t ) If all parameters ( M, F, K ) are constant, it is time in- variant. Otherwise, if any of the parameters is a func- tion of time, it is time varying. In this course, we only consider time-invariant systems. • Continuous time - discrete time systems A continuous time system is a system which describes the relationship between time continuous signals, and can be described by differential equations. A discrete system is a system which describes the relationship be- tween discrete signals, and can be described by differ- ence equations. In this course, we’ll consider systems both in continuous and discrete time. ✫ ✪ CACSD pag. 31 ESAT–SCD–SISTA
Recommend








More recommend
Explore More Topics
Stay informed with curated content and fresh updates.