An application of numerical bifurcation analysis Greg Lewis - PowerPoint PPT Presentation
An application of numerical bifurcation analysis Greg Lewis University of Ontario Institute of Technology (UOIT) with Bill Langford (Guelph) and Wayne Nagata (UBC) BIRS, August 8, 2007 BIRS p.1/48 Outline Introduction The
An application of numerical bifurcation analysis Greg Lewis University of Ontario Institute of Technology (UOIT) with Bill Langford (Guelph) and Wayne Nagata (UBC) BIRS, August 8, 2007 BIRS – p.1/48
Outline Introduction The differentially heated rotating annulus experiment Bifurcation analysis Numerical continuation Eigenvalue computation Examples differentially heated rotating annulus differentially heated rotating spherical shell Summary BIRS – p.2/48
A differentially heated rotating annulus Ω r a r b fluid R D T T a b z Ω y r x φ BIRS – p.3/48
A differentially heated rotating planet North Pole cold hot South Pole BIRS – p.4/48
A differentially heated rotating annulus Ω r a r b fluid R D T T a b z Ω y r x φ BIRS – p.5/48
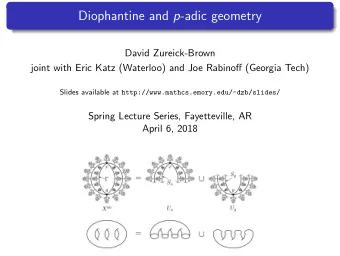
Regime diagram upper symmetric log(Thermal Rossby number) steady waves knee vacillation lower symmetric irregular log(Taylor number) BIRS – p.6/48
Wave flow in the annulus BIRS – p.7/48
Vacillating flow in the annulus BIRS – p.8/48
Regime diagram upper symmetric log(Thermal Rossby number) steady waves knee vacillation lower symmetric irregular log(Taylor number) BIRS – p.9/48
Bifurcation analysis Nonlinear DE: dx dt = G ( x, α ) , x ∈ R n , α ∈ R 1 . Steady solution x 0 = x 0 ( α ) when: G ( x 0 , α ) = 0 . Look for bifurcations from steady solution linear stability of steady solution from eigenvalues, λ , of the linearization of dynamical equation about the steady solution: G x ( x = x 0 , α ) . Real ( λ j ) < 0 for all j → x 0 is linearly stable Real ( λ j ) > 0 for one j → x 0 is linearly unstable BIRS – p.10/48
Numerical computations Steady solutions use pseudo-arclength continuation Linear stability: eigenvalues Implicitly restarted Arnoldi method with Cayley transformations BIRS – p.11/48
Steady solution: continuation Look for steady solutions discretization reduces PDE to system of nonlinear algebraic equations need to solve G ( x, α ) = 0 , x ∈ R n , α ∈ R Use Newton’s method with continuation need to have a good guess assume we know x 0 at α 0 such that G ( x 0 , α 0 ) = 0 BIRS – p.12/48
Natural parameterization x G(x, )=0 α x 1 x 0 ^ x 1 α 0 α α 1 BIRS – p.13/48
Natural parameterization x α G(x, ) = 0 x 1 x 0 x 1 α 1 α 0 α BIRS – p.14/48
Pseudo-arclength continuation Consider the parameter α as an unknown predictor: new guess (ˆ α 1 ) given by x 1 , ˆ x 1 = x 0 + ∆ s α 1 = α 0 + ∆ s � t 0 � t ( x ) � t 0 � t ( α ) ˆ 0 , ˆ 0 t 0 = [ t ( x ) t ( α ) 0 ] is the tangent to the solution curve 0 the step size ∆ s measures arclength along tangent line for corrector, add an extra condition to get new system: G ( x, α ) = 0 f ( x, α ) = 0 BIRS – p.15/48
Pseudo-arclength continuation x α G(x, ) = 0 x 3 x 3 t 2 x 2 x 2 x 1 t 1 x 0 α 1 α 0 α BIRS – p.16/48
Eigenvalue approximation Eigenvalue problem Linearize about steady solution get generalized eigenvalue problems λ B Φ = A Φ discretization leads to matrix eigenvalue problems BIRS – p.17/48
Eigenvalue approximation For eigenvalues use ‘Implicitly restarted Arnoldi method’ iterative memory efficient finds extremal eigenvalues BIRS – p.18/48
Eigenvalue approximation Use generalized Cayley transform C ( A , B ) = ( A − σ 1 B ) − 1 ( A − σ 2 B ) λ are eigenvalues from λ B x = A x µ are eigenvalues from µx ′ = C x ′ Real ( λ ) > σ 1 + σ 2 → | µ | > 1 2 BIRS – p.19/48
Eigenvalue approximation Use generalized Cayley transform C ( A , B ) = ( A − σ 1 B ) − 1 ( A − σ 2 B ) Don’t need to form the matrix C explicitly only need the matrix-vector product w = C v w = C v = ( A − σ 1 B ) − 1 ( A − σ 2 B ) v multiple by ( A − σ 1 B ) get: ( A − σ 1 B ) w = ( A − σ 2 B ) v i.e. a system of linear equations BIRS – p.20/48
Centre manifold reduction Apply centre manifold reduction at bifurcation points gives a low-dimensional model of dynamics get existence and stability of bifurcating solutions gives results close to a bifurcation point (local dynamics) Write ODE (reduced equation) in normal form compute the coefficients of the normal form equations Deduce dynamics of PDE from low-dimensional ODE BIRS – p.21/48
A differentially heated rotating annulus Ω r a r b fluid R D T T a b z Ω y r x φ BIRS – p.22/48
Model of fluid in the annulus Navier-Stokes equations in the Boussinesq approximation Cylindrical coordinates and rotating frame of reference No-slip boundary conditions Insulating top and bottom of annulus Differential heating: ∆ T = T b − T a inner cylinder cooled; outer cylinder heated Quantitatively accurate results BIRS – p.23/48
Analysis Look for steady flows invariant under rotation primary transitions reduces to problem in two-spatial dimensions Bifurcations from steady solutions BIRS – p.24/48
Regime diagram upper symmetric log(Thermal Rossby number) steady waves knee vacillation lower symmetric irregular log(Taylor number) BIRS – p.25/48
Transition curve (3,4) (4,5) 0 10 (5,6) (6,7) thermal Rossby number −1 (7,8) 10 (8,7) (7,6) −2 10 (6,5) theoretical transition curve −3 theoretical critical wave number transitions 10 experimental transition curve experimental critical wave number transitions 5 6 7 8 10 10 10 10 Taylor number BIRS – p.26/48
Regions of bi-stability (3,4) (4,5) 0 10 (5,6) (6,7) thermal Rossby number −1 (7,8) 10 (8,7) (7,6) −2 10 (6,5) −3 theoretical transition curve 10 theoretical critical wave number transitions boundaries of region of bistability 5 6 7 8 10 10 10 10 Taylor number BIRS – p.27/48
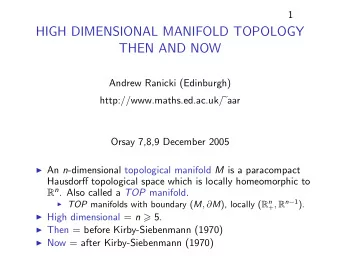
Spherical Shell Ω ∆ T g BIRS – p.28/48
Model of fluid in a spherical shell Navier-Stokes equations in the Boussinesq approximation Spherical polar coordinates and rotating frame of reference No-slip boundary conditions at inner sphere Stress-free boundary condition at outer sphere Insulating outer sphere Differential heating imposed on inner sphere: at r = r 0 , T = T 0 − ∆ T cos(2 θ ) . BIRS – p.29/48
Differential heating 4.5 4 3.5 T = T 0 3 T T = T 0 − ∆ T cos(2 θ ) 2.5 2 pole equator 1.5 0 0.5 1 1.5 θ BIRS – p.30/48
Spherical shell Ω R r 0 ∆ T BIRS – p.31/48
Analysis Look for steady flows invariant under rotation and reflection about equator Reduces to problem in two-spatial dimensions Introduces additional boundary conditions at pole and equator Bifurcations of steady solutions BIRS – p.32/48
✕ ✕ ✎ ✎ ✓ ✔ ✗ ✎ ✕ ✖ Steady Solution: , ✏✒✑ stream function azimuthal fluid velocity temperature deviation 2 2 2 + − 1.5 1.5 1.5 1 1 1 y y y 0.5 0.5 0.5 + − 0 1 2 0 1 2 0 1 2 x x x Bristol 05 – p.10/24
✕ ✖ ✎ ✎ ✓ ✔ ✔✘ ✎ ✕ Steady Solution: , ✏✒✑ stream function azimuthal fluid velocity temperature deviation 2 2 2 + − 1.5 1.5 1.5 1 1 1 y y y + 0.5 0.5 0.5 − 0 1 2 0 1 2 0 1 2 x x x Bristol 05 – p.11/24
✕ ✗ ✚ ✎ ✓ ✔ ✙ ✎ ✎ ✖ ✕ Steady Solution: , ✏✒✑ stream function azimuthal fluid velocity temperature deviation 2 2 2 + − 1.5 1.5 1.5 1 1 1 y y y 0.5 0.5 0.5 − + 0 1 2 0 1 2 0 1 2 x x x Bristol 05 – p.12/24
✕ ✕ ✎ ✎ ✓ ✔ ✎ ✕ ✖ Steady Solution: , ✏✒✑ stream function azimuthal fluid velocity temperature deviation + − 2 2 2 1.5 1.5 1.5 1 1 1 y y y 0.5 0.5 0.5 + − 0 1 2 0 1 2 0 1 2 x x x Bristol 05 – p.13/24
✎ ✓ ✎ ✕ ✖ ✕ ✔✛ ✎ Steady Solution: , ✏✒✑ stream function azimuthal fluid velocity temperature deviation 2 2 2 + − 1.5 1.5 1.5 1 1 1 y y y 0.5 0.5 0.5 + − 0 1 2 0 1 2 0 1 2 x x x Bristol 05 – p.14/24
✏ ✑ ✎ ✓ ✎ Bifurcation Diagram: Eigenvalue with largest real part −5 x 10 −9.6 max real( λ ) −9.7 0.01 0.0125 0.015 0.0175 0.02 ∆ T Continuation of steady solution −3 x 10 6 2−cell 5 || ξ || 2 4 1−cell 3 0.01 0.0125 0.015 0.0175 0.02 ∆ T Bristol 05 – p.15/24
✕ ✕ ✓ ✎ ✚ ✖ ✜ ✕ ✎ ✎ ✖ Steady Solution: , ✏✒✑ stream function azimuthal fluid velocity temperature deviation − + 2 2 2 1.5 1.5 1.5 1 1 1 y y y 0.5 0.5 0.5 + − 0 1 2 0 1 2 0 1 2 x x x Bristol 05 – p.16/24
✎ ✕ ✛ ✎ ✚ ✖ ✜ ✓ ✎ ✕ ✖ Steady Solution: , ✏✒✑ stream function azimuthal fluid velocity temperature deviation 2 2 2 + − 1.5 1.5 1.5 1 1 1 y y y 0.5 0.5 0.5 + − 0 1 2 0 1 2 0 1 2 x x x Bristol 05 – p.17/24
✺ ✻ ✘ ✺ ❄ ✿ ❅ Bifurcation Diagram: Eigenvalue with largest real part −8 x 10 0 max real( λ ) −5 −10 0.0107 0.0108 0.0109 ∆ T Continuation of steady solution −3 x 10 2−cell 1.5 || ξ || 2 1−cell 1 0.0107 0.0108 0.0109 ∆ T DEDS: Pattern Formation – p.27/35
Recommend












More recommend
Explore More Topics
Stay informed with curated content and fresh updates.