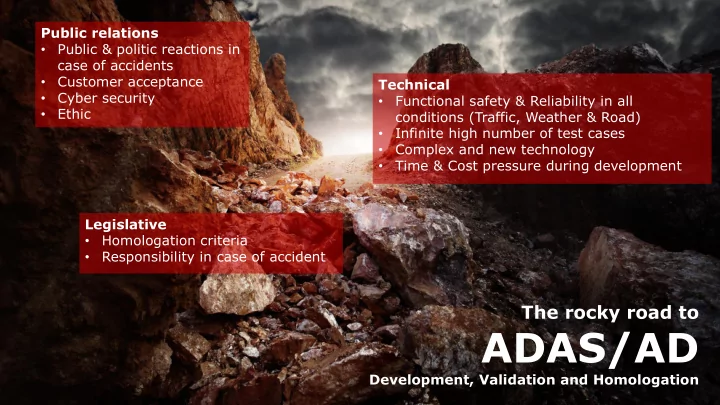
Public relations Public & politic reactions in • case of accidents Customer acceptance • Technical Cyber security • Functional safety & Reliability in all • Ethic • conditions (Traffic, Weather & Road) Infinite high number of test cases • Complex and new technology • Time & Cost pressure during development • Legislative Homologation criteria • Responsibility in case of accident • The rocky road to ADAS/AD Development, Validation and Homologation Public 1 Tobias Dueser | AVL List GmbH | 2019-03-20 |
Level 5 Now Future Driver’s License ? ? Regulations Responsibility Public 2 Tobias Dueser | AVL List GmbH | 2019-03-20 |
A lot of progress concerning the TECHNOLOGY is visible, but: “The critical path to introduce autonomous driving vehicles will not be the technology but the development of a metric which empowers for an approval” Prof. Dr. rer. nat. H. Winner, November 2013 … and the next question will be how to execute scenarios, test cases etc. of this metric in a limited time Public 3 Tobias Dueser | AVL List GmbH | 2019-03-20 |
“The biggest hurdle is validation to confirm that the system does not cause failures. One has to execute 250 million test kilometers” Bosch Executive Director. New and Innovative Approaches in Same approaches as 36 years ago? Testing and Validation Mercedes-Benz 190 E are necessary! (1982) - Demonstration and advantages of ABS Public 4 Tobias Dueser | AVL List GmbH | 2019-03-20 |
Facing the Challenges of Development and Homologation of Autonomous Driving Using Virtual Approaches § Vehicle Validation Legislation, Driving Software and and Self Driving Regulations and Digital Driver Conformity Vehicle Public 5 Tobias Dueser | AVL List GmbH | 2019-03-20 |
Regulation for Homologation and Approval of AV Dr. Houssem Abdellatif Global Head Autonomous Driving and ADAS Public 6 Tobias Dueser | AVL List GmbH | 2019-03-20 |
HOMOLOGATION Qu'est-ce que c’est? TÜV SÜD MOBILITY | PERSPECTIVES FOR HAD HOMOLOGATION 2019-03-20 7
Take a SIMPLE IDEA … test track real vehicle subset for physical testing subset for homologation simulation virtual vehicle Maneuver / scenario data base subset for simulation testing • description • parameters • fail/pass criteria (KPI) results: m vehicle variants X n scenario variants X … A 6 Points Approach to realize this Idea to empower for Approval TÜV SÜD MOBILITY | PERSPECTIVES FOR HAD HOMOLOGATION 2019-03-20 8
TÜV SÜD MOBILITY | PERSPECTIVES FOR HAD HOMOLOGATION 2019-03-20 9
TÜV SÜD MOBILITY | PERSPECTIVES FOR HAD HOMOLOGATION 2019-03-20 10
TÜV SÜD MOBILITY | PERSPECTIVES FOR HAD HOMOLOGATION 2019-03-20 11
TÜV SÜD MOBILITY | PERSPECTIVES FOR HAD HOMOLOGATION 2019-03-20 12
Change This! TÜV SÜD MOBILITY | PERSPECTIVES FOR HAD HOMOLOGATION 2019-03-20 13
2019-03-20 14 TÜV SÜD MOBILITY | PERSPECTIVES FOR HAD HOMOLOGATION 19-03-20 14
Combining Tools (Tool Chain) for Concise Approval test track subset for physical testing real vehicle test bench subset for approval virtual vehicle subset for testbench testing Scenario data base simulation • description • parameters • fail/pass criteria (KPI) subset for simulation testing results: m vehicle variants X n scenario variants X … TÜV SÜD Auto Service GmbH | GTC Europe 2018 2019-03-20 15
Virtual Testing & The Toolchain Dr. Tobias Dueser Department Manager Advanced Solution Lab Public 16 Tobias Dueser | AVL List GmbH | 2019-03-20 |
A seamless but open toolchain with new approaches is necessary Simulation Virtual TESTING Proving Ground Real World Maneuver, Scenario, Test Case Abstraction incl. KPIs Environment Abstraction Vehicle Abstraction Same Results The most efficient validation will be done by those who will use the best combination… Public 17 Tobias Dueser | AVL List GmbH | 2019-03-20 |
Insights: Approach for the best combination… Focus of this slide is system (vehicle) validation. In addition there Proving Real Simulation: Virtual TESTING: Proving Ground and Simulation Virtual TESTING Ground World Real World will be component test beds like HiL, Sensor Test Beds, etc. Scale Testing of Variants Integrate, Analyze and Finalize and Confirm (Vehicle Configurations and Scenarios) Improve reproduce analyze Optimize/ Improve Remark: + specific test cases which cannot be + specific test cases which cannot be done in simulation done in simulation and/or Virtual Testing Public 18 Tobias Dueser | AVL List GmbH | 2019-03-20 |
Toolchain Validation Example Vehicle Dynamics “The validity of the applied modelling and simulation tool shall be verified by means of comparisons with practical vehicle tests. The tests utilized for the validation shall be the dynamic maneuvers (…)“ Source: Uniform provisions concerning the approval of passenger cars with regard to Electronic Stability Control (ESC) Systems, ECE R140 Correlation Results and Approval of Usage of Simulation for Determination and Parameterization of Simulation ADAS/AD Validation Identification of Parameters Simulation Models Mandatory Preparation (Validation and Approval of Models and Toolchain) ADAS/AD Validation Public 19 Tobias Dueser | AVL List GmbH | 2019-03-20 |
Toolchain Validation Example Vehicle Dynamics Vehicle prototypes Virtual prototype Public 20 Tobias Dueser | AVL List GmbH | 2019-03-20 |
Challenge Co-Simulation (1) Boundary Conditions: Requirements and Challenges (Overview): In the area of simulation there is not only ONE tool An open integration platform is crucial! or ONE model. Different tools have different advantages, different models are for different use The platform need to combine simulation and real cases (e.g. dynamic scenarios require complex components up to the real vehicle vehicle dynamics) Integration on simulation level is more the Example bandwidth based on customer use cases exchanging signals! # Powertrain Vehicle Environment Function Dynamics 1 CUS Simulink MSC ADAMS VIRES VTD CUS FMU 2 AVL VSM AVL VSM CUS Tool ROS1 Node 3 Real on Test Real on Test VIRES VTD On control Bed Bed unit 4 CUS Simulink CUS Simulink IPG CarMaker ROS2 Node … and the landscape is broad! Public 21 Tobias Dueser | AVL List GmbH | 2019-03-20 |
Challenge Co-Simulation (2) Requirements and Challenges (Details): Example: AEB Scenario: Mathematical View: Technical View: “Full braking after acceleration to 100 km/h” ▪ Multi-method ▪ Multi-domain development ▪ Multi-solver ▪ Multi-tool approach Significantly longer braking Correct (co-)simulation ▪ Multi-vendor ▪ Multi-rate distance (~1.9 m) due to result with NEPCE*) in Model.CONNECT™ coupling error! ▪ Dynamic coupling ▪ Dynamic coupling ➢ Coupling error ➢ Virtual prototype representation k, m, n >> solver solver solver solver solver solver solver *) NEPCE … Nearly Energy Preserving Coupling Element Public 22 Tobias Dueser | AVL List GmbH | 2019-03-20 |
Implementation with NVIDIA Tools Reference: Proving Ground AVL DRIVE for ADAS KPI Methodology, Test Catalogue Proving Ground and KPIs for AD Function very close to the real operation SC Vehicle Interface expensive, high effort, less repeatability NVIDIA DRIVE AD Function Vehicle Under Test Real Vehicle on Real Vehicle on Real Proving Ground Real Proving Ground Public 23 Tobias Dueser | AVL List GmbH | 2019-03-20 |
Implementation with NVIDIA Tools Virtual Testing @ the AVL DRIVINGCUBE™ AVL DRIVE for ADAS DRIVE KPI Interface NVIDIA Methodology, AVL VECON DRIVE SIM Test Catalogue Virtual Testing and KPIs TB for AD Function Interface Testbed.CONNECT ™ with Model.CONNECT ™ close to real operation, chassis dynos are already established for homologation SC Vehicle Interface (emissions) NVIDIA DRIVE limited in terms of lateral CAN dynamics Interface AD Function DRIVE SIM Vehicle Wrapper Under Virtual Vehicle on Test Real Vehicle on Virtual Proving AVL DRIVINGCUBE™ Ground Public 24 Tobias Dueser | AVL List GmbH | 2019-03-20 |
Public 25 Tobias Dueser | AVL List GmbH | 2019-03-20 |
The AVL DRIVINGCUBE™… …as vehicle integration lab Different functions and perceptions must be evaluated at a certain time in the vehicle. … for security testing The DRIVINGCUBE is Hacking attacks to evaluate the security of the the only test vehicle must also be environment for performed during operation of the vehicle. reproducible and Do you want repeatable test on to try an attack on a vehicle level! highway at high speed? … to reproduce critical scenarios … as most efficient test instance and tests for a lot of use cases Critical Scenarios (in Different uses cases in general or determined validation and also out of simulation) must homologation can not be be analyzed on vehicle executed efficiently in other level in a reproducible test instances (e.g. ECE 79: way. LKA above 130km/h) Public 26 Tobias Dueser | AVL List GmbH | 2019-03-20 |
…as vehicle integration lab: Details DRIVINGCUBE as vehicle integration lab Steering HMI Thermal Powertrain Autopilot lateral Vehicle Autopilot long Perception Braking Public 27 Tobias Dueser | AVL List GmbH | 2019-03-20 |
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries