A"New"Framework"for"Stability"Analysis" - PowerPoint PPT Presentation
A"New"Framework"for"Stability"Analysis" ! ! of"Networked"Control"Systems Oct!16,!2012,!Lund,!Yumiko!Ishido.!!!!! Research(Interests: !Analysis!and!Synthesis!of!Nonlinear!Systems.
A"New"Framework"for"Stability"Analysis" ! ! of"Networked"Control"Systems � Oct!16,!2012,!Lund,!Yumiko!Ishido.!!!!! Research(Interests: !Analysis!and!Synthesis!of!Nonlinear!Systems. � Networked!Control!Systems � • Good!tools!for! Linear(Systems.( • Extensions!for! some(classes(of( Linear!Systems � Nonlinear(Systems.(( (Robust!control!based!on!small!gain! theorem,!IQC!approach,!gain!scheduling,! Extensions � etc…) � Nonlinear!Systems � Goal:!Develop!a!MathemaHcal!Framework!for!Analysis!and! Synthesis!of!Networked!Control!Systems. �
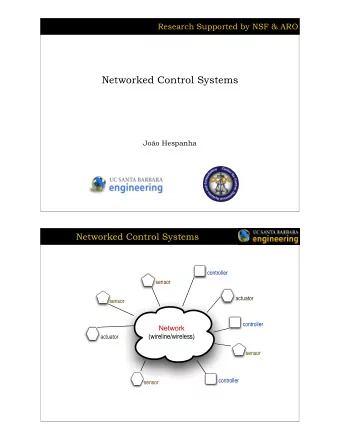
Networked"Control"Systems � Involving!a!data!rateSlimited! actuator � plant � communicaHon!channel! plant � CommunicaHon! controller � Channel � Involving!a!finiteSlevel! plant � controller � valued!actuator � sensor � Involving!an!eventS triggered!sensor! controller �
Networked"Control"Systems � Involving!a!data!rateSlimited! actuator � plant � communicaHon!channel! plant � FiniteSlevel!quanHzaHon!is!involved!in!the! CommunicaHon! controller � Channel � feedback!loop.! 3.!Involving!a!finiteS plant � controller � leveled!actuator � sensor � Involving!an!eventS triggered!sensor! controller �
Classical"Framework"does"not"work? � Ex1:!StabilizaHon!of!an!uncertain!plant!over!a!rateSlimited!communicaHon!channel. � Small(Gain(Theorem(Is(NOT(Applicable!! � Achievable!inputSoutput!property!(MarHns): � s.t. � Suppose � Unbounded! bit � Growth!Rate � Need!for!introducing!a!pracHcal! Unstable!LTI � Local!Stability!Analysis!Framework. � !!!!!Sgain!bounded �
Classical"Framework"does"not"work? � Ex2:!Stability!analysis!of!a!feedback!system!involving!a!uniform!quanHzer. � SISO,!LTI � uniform!quanHzer � S � S � Stability(Condi@on � quanHzaHon!error �
A"New"Analysis"Framework"for" Networked"Control"Systems � 1. Introduce!a!reasonable!noHon!of!local!stability!for! networked!control!systems.! 2. Derive!a!key!theorem!for!stability!analysis.! 3. Prepare!a!new!class!of!nonlinearity!that!is!suitable!for! expressing!quanHzaHon!errors. �
Small""""""""Signal""""""""Stability � Small!!!!!!!signal!!!!!!!stability � Local(Boundedness � A!map!!!!!!is!said!to!be!small!!!!!!signal!!!!!!stable!with!level!!!!!and!input! bound!!!!!if! � holds!for!given!constants!!!!!!!!!!!!!!!!!!!!!!.!
Comparison"with"existing"stabilities � !!!!!!stability � such!that � Finite!gain!!!!!!stability � such!that � Small!!!!!!signal!!!!!!!stability!is… � " weaker!than!!!!!!!stability!or!finite!gain!!!!!!stability! " equivalent!when!!!!!!!!is!a!linear!map �
Comparison"with"existing"stabilities � such!that � Local!!!!!!stability!(Bourles!1996) � Small!signal!!!!!!!stability!(Vidyasagar!&!Vanelli,!1982) � such!that � Small!!!!!!signal!!!!!!!stability!is… � " Defined!with!local!upper!bounds!on!inputSoutput!signals!(not! defined!with!gain).!
Comparison"with"existing"stabilities � Local!!!!!!!stability! � Small!!!!!!!signal!!!!!!stability! � VS � “Local(finite(gain(stability” � “Local(boundedness” �
Recall! � Classical"Framework"does"not"work? � Ex1:!StabilizaHon!of!an!uncertain!plant!over!a!rateSlimited!communicaHon!channel. � Small(Gain(Theorem(In(NOT(Applicable!! � Achievable!inputSoutput!property!(MarHns): � s.t. � Suppose � Unbounded! bit � Growth!Rate � Need!for!introducing!a!pracHcal! Unstable!LTI � Local!Stability!Analysis!Framework. � !!!!!Sgain!bounded �
Comparison"with"existing"stabilities � InputStoSoutput!pracHcal!stability!(Jiang!et.al!1994)! � such!that � Small!!!!!!signal!!!!!!!stability!is… � " Local!stability!noHon.!
Small""""""""Signal"""""""Stability � The!feedback!system!is!said!to!be!small!!!!!!signal!!!!!!stable!if!there! exist!!!!!!!!!!!!!!!!!!!!!!!!such!that! �
(Discrete"time)"Small"Level"Theorem � Small!Level!Theorem � Assume!the!following!condiHons!hold. � (i)!!!!!!!!!!!! strictly!causal!&!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!such!that � (ii)!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!such!that � (iii) � (iv) � Then!the!feedback!system!is!small!!!!!!!signal!!!!!!!stable. �
(Discrete"time)"Small"Level"Theorem � Small!Level!Theorem � (ConHnued)!In!parHcular, �
Small"Gain"Theorem"vs"Small"Level"Theorem � Small!Level!Theorem � Small!Gain!Theorem �
Level"Bounded"Nonlinearity � Level!bounded!nonlinearity � Suitable(for(approxima@ng(quan@za@on(errors � Theorem � Assume!there!exist!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!saHsfying � (i) � (ii) � Then,!the!feedback!system!is!small!!!!!!!signal!!!!!!stable �
A"New"Local"Analysis"Framework � Small!!!!!!!signal!!!!!!!stability � Local(Boundedness � Input!bound � AdenuaHon!level � Small!Level!Theorem � If!both!subsystems!have!sufficiently! small(level,( then!the!feedback! system!is!small!!!!!!!signal!!!!!!!stable. � Level!Bounded!Uncertainty � Suitable(for(approxima@ng(quan@za@on(errors � Quan@ta@ve(Local(Analysis(Framework(based(on(Local(Boundedness. �
Application"Example"1 � Uncertain!Plant � Nominal!Plant!(Unstable!LTI): � !gain!bouded � Uncertainty � bit � Channel � Unstable!LTI � & � Causal!maps � !!!!!Sgain!bounded �
Application"Example"1 � Small!Level!CondiHon � If � holds!for!posiHve!constants!!!!!!!!!!!!!!!!!!!!!!!!, � the!feedback!system!is!small!!!!!!!signal! stable!!!!!!!!!!!!!!!!!!!!!!!!!. � bit � ( Sufficient(condi@on(on(data(rate((((((((for( the(existence(of(((((((((((((((((((((((s.t.(the(small( level(condi@on(hold. ( Unstable!LTI � (Necessary(and(sufficient(condi@on(( !!!!!Sgain!bounded � for(scalar(nominal(plant)( (
Application"Example"1 � Scalar!Nominal!Plant � Theorem � Assume!!!!!!!!!!!!!!!! ���� s.t.!small!level!condiHon!holds!for!some! !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!! ,!then!!!!!!!saHsfies � Conversely,!if!!!!!!!saHsfies � For!any!!!!!!!!!!! �� ,!there!exist!!!!!!!!!!!!!!!!!!!!!!s.t.!nominal!part!saHsfies!the! small!level!condiHon.!
Application"Example"1 � Nominal!Plant � Admissible!uncertainty � (Transfer!Matrix) � Data!rate!at!the!channel � TradeToff(between(data(rate(and(uncertainty �
New"Class"of"Nonlinearities � Uniform!quanHzer � Rounding!input!to!the!nearest!output. � step!size � :!quanHzaHon!levels � gain!bounded!nonlinearity � level!bounded!nonlinearity � S � S �
Application"Example"2 � EventTtriggered(sensor � # ConHnuously!observes!!!!!.! # Sends!informaHon!to!the!controller! only!when!!!!!saHsfies!some!condiHon. � LTI!systems � Involves(sampling(rather(than(quan@za@on. �
Application"Example"2 � Scalar!Nominal!Plant � FixedTrange(triggered(type � (i)!If!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!,!then � (ii)!If!!!!!!!!!!!!!!!!!!!!!,!then � (iii)!If!!!!!!!!!!!!!!!!!!!!!!!!,!then �
Application"Example"2 � Nonlinearity � Linear!system � Derive!a!condiHon!on!sensor!parameters!for!local!stability �
Application"Example"2 � Theorem � If! � Then,!the!eventStriggered!system!is!small!!!!!!!!!signal!!!!!!!!!stable.! In!parHcular,!! �
Application"Example"2 � Numerical!Example � Plant � Controller!1 � Stability!CondiHon � Any(posi@ve(d(and(D(are(OK. � Norm!bounds � �� ��
Application"Example"2 � 3 2 z ( t ) 1 �� 0 − 1 − 2 − 3 t 0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000 1.5 1 �� z ( t ) 0.5 0 − 0.5 − 1 − 1.5 t 0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000
Application"Example"2 � Numerical!Example � Plant � Controller!2 � Stability!CondiHon � Norm!bounds � ��
Application"Example"2 � 1.5 1 z ( t ) 0.5 0 − 0.5 − 1 − 1.5 t 0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000
Conclusions � Research(Interests: !Analysis!and!Synthesis!of!Nonlinear!Systems. � Networked!Control!Systems � $ Local!analysis!framework!for! networled!control!systems! Linear!Systems � $ Extension!to!conHnuousSHme! hybrid!systems! Extensions � Nonlinear!Systems � Possible(future(work: � 1. Lyapunov!approach:!relaHon!with!internal! stabiliHes.!Focusing!on!a!bounded!band?! 2. Analysis!of!stabilizable!range!for!a!locally! stabilizing!controller.!!
Recommend






More recommend
Explore More Topics
Stay informed with curated content and fresh updates.