A NEW DISCOVERY: NONLINEAR INSTABILITY LEADING TO LOSS OF CONTROL - PowerPoint PPT Presentation
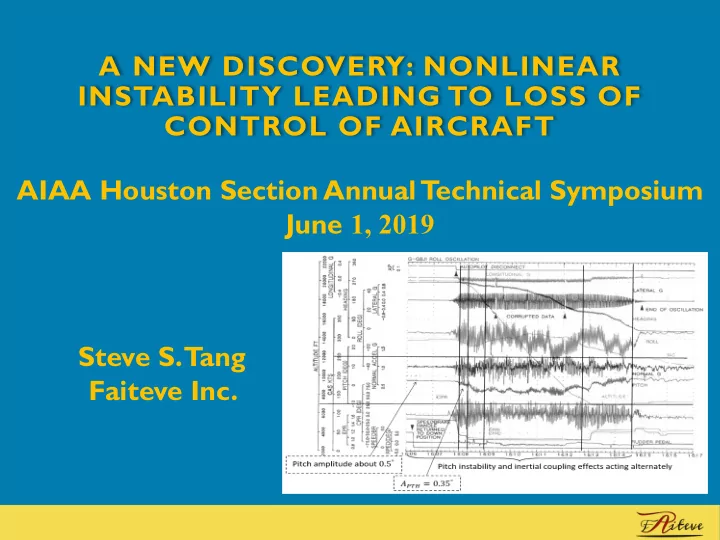
A NEW DISCOVERY: NONLINEAR INSTABILITY LEADING TO LOSS OF CONTROL OF AIRCRAFT AIAA Houston Section Annual T echnical Symposium June 1, 2019 Steve S. Tang Faiteve Inc. Neglected elephants in the equations The
A NEW DISCOVERY: NONLINEAR INSTABILITY LEADING TO LOSS OF CONTROL OF AIRCRAFT AIAA Houston Section Annual T echnical Symposium June 1, 2019 Steve S. Tang Faiteve Inc.
̇ ̇ ̇ ̇ ̇ ̇ Neglected elephants in the equations § The original governing equations for aircraft roll ( 𝜒) , pitch ( 𝜄) , and yaw ( 𝜔) in the principal axis frame ( 𝐽 & < 𝐽 ( < 𝐽 ) ) : 𝜄 ̇ 𝐽 & ̈ 𝜒 + 𝑐 - ̇ 𝜒 + 𝑙 - 𝜒 = 𝐽 ( − 𝐽 ) 𝜔 + 𝑁 3 (𝑢) 𝐽 ( ̈ 𝜄 + 𝑐 6 ̇ 𝜒 ̇ 𝜄 + 𝑙 6 𝜄 = 𝐽 ) − 𝐽 & 𝜔 + 𝑁 7 𝑢 𝐽 ) ̈ 𝜔 + 𝑐 8 ̇ 𝜒 ̇ 𝜔 + 𝑙 8 𝜔 = 𝐽 & − 𝐽 ( 𝜄 + 𝑁 9 𝑢 § The linearized equations: 𝐽 3 ̈ 𝜒 + 𝑐 - ̇ 𝜒 + 𝑙 - 𝜒 = 𝑁 3 (𝑢) 𝐽 7 ̈ 𝜄 + 𝑐 6 ̇ 𝜄 + 𝑙 6 𝜄 = 𝑁 7 𝑢 𝐽 9 ̈ 𝜔 + 𝑐 8 ̇ 𝜔 + 𝑙 8 𝜔 = 𝑁 9 𝑢 𝜄 ̇ 𝜒 ̇ 𝜒 ̇ § 𝐽 7 − 𝐽 9 𝜔 , 𝐽 9 − 𝐽 3 𝜔 , 𝐽 3 − 𝐽 7 𝜄 - the inertial moments, similar to Coriolis force for hurricanes, should not be neglected
̇ ̇ ̇ The elephants causing resonances § As nonlinear harmonic oscillation system: 𝜄 ̇ 𝐽 3 ̈ 𝜒 + 𝑐 - ̇ 𝜒 + 𝑙 - 𝜒 = 𝐽 7 − 𝐽 9 𝜔 + 𝑁 3 (𝑢) 𝐽 7 ̈ 𝜄 + 𝑐 6 ̇ 𝜒 ̇ 𝜄 + 𝑙 6 𝜄 = 𝐽 9 − 𝐽 3 𝜔 + 𝑁 7 𝑢 𝐽 9 ̈ 𝜔 + 𝑐 8 ̇ 𝜒 ̇ 𝜔 + 𝑙 8 𝜔 = 𝐽 3 − 𝐽 7 𝜄 + 𝑁 9 𝑢 What matters the most is the exciting frequencies of these terms, not the amplitudes
̇ ̇ ̇ A pitch control case § The most common maneuver in takeoff, cruise leveling and landing approach § The original governing equations: 𝜄 ̇ 𝐽 3 ̈ 𝜒 + 𝑐 - ̇ 𝜒 + 𝑙 - 𝜒 = 𝐽 7 − 𝐽 9 𝜔 𝐽 7 ̈ 𝜄 + 𝑐 6 ̇ 𝜒 ̇ 𝜄 + 𝑙 6 𝜄 = 𝐽 9 − 𝐽 3 𝜔 + 𝑁 6- 𝑑𝑝𝑡(𝜕 6- 𝑢 + 𝛽 6- ) 𝐽 9 ̈ 𝜔 + 𝑐 8 ̇ 𝜒 ̇ 𝜔 + 𝑙 8 𝜔 = 𝐽 3 − 𝐽 7 𝜄 § The current longitudinal dynamics (pitch control only): 𝐽 7 ̈ 𝜄 + 𝑐 6 ̇ 𝜄 + 𝑙 6 𝜄 = 𝑁 6- 𝑑𝑝𝑡(𝜕 6- 𝑢 + 𝛽 6- )
Solutions and bifurcations § By the current practice, the aircraft response is (caterpillar mode) 𝜒 = 0 𝜄 = 𝜄 @ (𝑁 6- ) cos 𝜕 6- 𝑢 + 𝛽 6- + 𝜊 6- 𝜔 = 0 § This pitch-only response is not always stable. Under certain conditions, the following roll, pitch and yaw bifurcation solutions (butterfly mode) exist. H 𝜒 F 𝑢 = ∑ FG- H 𝐵 -F cos 𝜕 -F 𝑢 + 𝛾 -F 𝜒 𝑢 = ∑ FG- H 𝜄 H 𝐵 6K cos 𝜕 6K 𝑢 + 𝛾 6K 𝜄 𝑢 = ∑ KG- K 𝑢 = ∑ KG- H 𝜔 L 𝑢 = ∑ LG- H 𝐵 8L cos 𝜕 8L 𝑢 + 𝛾 8L 𝜔 𝑢 = ∑ LG-
Amplitudes of the 1 st modes § Solve the amplitudes: -/6 -/6 𝐵 -- = 2 𝐽 7 𝐽 9 𝑎 6- 𝑎 8- 𝑁 6- 𝐽 9 − 𝐽 7 𝐽 7 − 𝐽 3 − 1 𝜕 -- (𝐽 9 − 𝐽 3 )(𝐽 7 − 𝐽 3 ) 2𝐽 7 𝑎 6- 𝐽 3 𝐽 9 𝑎 -- 𝑎 8- Pitch -/6 2 𝐽 3 𝐽 9 𝑎 -- 𝑎 8- amplitude Pitch moment 𝑁 6- 𝐵 6- = 𝜕 6- (𝐽 9 − 𝐽 7 )(𝐽 7 − 𝐽 3 ) cutoff from driving roll and yaw 𝑁 6- -/6 -/6 2 𝐽 3 𝐽 7 𝑎 6- 𝑎 -- 𝑁 6- 𝐽 9 − 𝐽 7 𝐽 7 − 𝐽 3 𝐵 8- = − 1 𝜕 8- (𝐽 9 − 𝐽 7 )(𝐽 9 − 𝐽 3 ) 2𝐽 7 𝑎 6- 𝐽 3 𝐽 9 𝑎 -- 𝑎 8- 6 − 𝜕 -@ 6 ) 6 +( Q R S RR ) 6 /𝜕 -- 𝑎 -- = (𝜕 -- Roll impedance: T U 6 − 𝜕 8@ 6 ) 6 +( Q V S VR 𝑎 8- = (𝜕 8- ) 6 /𝜕 8- Yaw impedance: T W
Pitch conditional instability criterion § Pitch unstable if -/6 T U T W Y RR Y VR , pitch moment threshold 𝑁 6- > 2𝐽 7 𝑎 6- (T W ZT [ )(T [ ZT U ) -/6 6 T U T W Y RR Y VR Pitch amplitude > 𝐵 \]^ ≡ , pitch threshold S `R (T W ZT [ )(T [ ZT U ) § Pitch stable if -/6 T U T W Y RR Y VR 𝑁 6- ≤ 2𝐽 7 𝑎 6- (T W ZT [ )(T [ ZT U ) § Proved in the book, if the first modes 𝜒 - , 𝜄 - , 𝜔 - exist, 𝜒 6 , 𝜄 6 , 𝜔 6 ; 𝜒 8 , 𝜄 8 , 𝜔 8 , … exist.
Pitch instability threshold verification Scenario 1 § A commercial aircraft model 80 70 Analytical was used to do the numerical Numerical 60 Pitch threshold (deg) 50 simulations. 40 30 § Pitch instability threshold in 20 10 Scenario 1 0 4 4.5 5 5.5 6 6.5 7 7.5 8 8.5 9 9.5 10 Pitch frequency (rad/s) Scenario 2 The worst case: 𝜕 6- = 𝜕 -@ + 𝜕 8@ 120 100 Analytical Numerical Pitch threshold (deg) 80 § Pitch instability threshold in 60 Scenario 2 40 20 The worst case: 𝜕 6- = 𝜕 -@ − 𝜕 8@ 0 1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3 Pitch frequency (rad/s)
The worst case – a resonance mode § The pitch critical frequency: 𝜕 6- = 𝜕 efFgFehL ≡ 𝜕 -@ + 𝜕 8@ § Pitch amplitude threshold -/6 2 𝑐 - 𝑐 8 𝐵 \]^ ≡ 𝜕 -@ + 𝜕 8@ (𝐽 9 − 𝐽 7 )(𝐽 7 − 𝐽 3 ) § Two dangerous situations, 1. At stall, Roll damping; 𝑐 - → 0, then 𝐵 \]^ → 0 2. Yaw damper malfunction, turned off or hardover Yaw damping: 𝑐 8 → 0, then 𝐵 \]^ → 0
The danger during takeoff § At the pitch critical frequency 𝜕 efFgFehL , aircraft is prone caterpillar sketch to nonlinear pitch instability before stall during takeoff
Loss of control of aircraft § A pitch control producing 80 40 18 ° pitch oscillation at Roll (deg) 0 -40 𝜕 6- = 5.2 (𝑆𝑏𝑒/𝑡 ) -80 0 20 40 60 80 100 Time (sec) “Uncommanded” r oll 55 ° § The pitch amplitude 50 threshold: 𝐵 \]^ = 12 ° 25 Pitch (deg) 0 § Pitch unstable: -25 -50 0 20 40 60 80 100 pitch 18 ° > 𝐵 \]^ = 12 ° Time (sec) “Uncommanded” pitch 37 ° § The final steady state 50 25 Yaw (deg) amplitudes depend on the 0 -25 external pitch control -50 0 20 40 60 80 100 Time (sec) “Uncommanded” y aw 36 ° amplitude
B737-236 mode change from caterpillar to butterfly happened 1.5 min before autopilot disconnect control of aircraft on B 737-236 Advanced G-BGJI Nonlinear pitch instability leading to Loss of
Nonlinear pitch instability leading to Loss of control of aircraft on Ethiopian Airline Flight 302 B 737 Max Flight 302 bifurcated from caterpillar to butterfly mode 4 seconds before stick shaker activated Uncommanded roll began 4 seconds earlier Stick shaker began 4 seconds later Pitch ≈ 18 ° > Boeing recommended pitch 15 −16 ° AOA ≈ 15 ° , critical AOA → 𝑐 - → 0, 𝐵 \]^ → 0, 𝒒𝒋𝒖𝒅𝒊 𝒐𝒑𝒐𝒎𝒋𝒐𝒇𝒃𝒔𝒎𝒛 𝒗𝒐𝒕𝒖𝒃𝒄𝒎𝒇
The list of nonlinear pitch instability leading to loss of control of aircraft during takeoff § Northwest Flight 255 MD DC- 9-82 crashed in 1987 § Delta Airlines Flight 1141 B 727-232 crashed in 1988 § USAir Flight 405 Fokker F- 28 crashed in 1992 § American Airline Flight 587 A 300-605 R crashed in 2001 § PT. Mandala Airlines Flight 091 B 737-200 crashed in 2005 § Air Transat A 310-308 C-GPAT upset in 2008 § Spainair Flight 5022 MD DC- 9-82 crashed in 2008 § Gulfstream GVI (G650) N652GD test flight crashed in 2011 § Ethiopian Airlines Flight 302 B 737 Max crashed in 2019
Nonlinear pitch instability demonstration (www.youtube.com/watch?v=gG2-mu6I11A) § Aircraft model with restoring and damping for roll and yaw 𝜕 -@ = 2𝜌, 𝑈 -@ = 1 𝑡𝑓𝑑 𝜕 8@ = 𝜌, 𝑈 8@ = 2 𝑡𝑓𝑑 § The dangerous pitch frequencies Scenario 1 : 𝜕 6- = 𝜕 -@ + 𝜕 8@ = 3𝜌 -/6 𝑈 6- = 0. 7𝑡, 𝐵 \]^Z- = 6 Q R Q V = 𝐵 \]^Z6 /3 8‰ (T W ZT [ )(T [ ZT U ) Scenario 2 : 𝜕 6- = 𝜕 -@ − 𝜕 8@ = 𝜌 -/6 𝐵 \]^Z6 = 2 𝑐 - 𝑐 8 𝑈 6- = 2 𝑡, 𝜌 (𝐽 9 − 𝐽 7 )(𝐽 7 − 𝐽 3 ) § Experimental observation: 𝐵 \]^Z6 = 3𝐵 \]^Z-
Recommend











More recommend
Explore More Topics
Stay informed with curated content and fresh updates.