A Lagrangean Based Branch-and-Cut Algorithm for Global Optimization - PowerPoint PPT Presentation
A Lagrangean Based Branch-and-Cut Algorithm for Global Optimization of Nonconvex Mixed-Integer Nonlinear Programs with Decomposable Structures Ramkumar Karuppiah and Ignacio E. Grossmann Department of Chemical Engineering Carnegie Mellon
A Lagrangean Based Branch-and-Cut Algorithm for Global Optimization of Nonconvex Mixed-Integer Nonlinear Programs with Decomposable Structures Ramkumar Karuppiah and Ignacio E. Grossmann Department of Chemical Engineering Carnegie Mellon University Workshop on Global Optimization: Methods and Applications Fields Institute May 2007 Carnegie Mellon
Introduction Many real-world optimization problems are nonconvex v Have multiple local optima § Hard to converge to global optimum § Examples: Water Networks and Crude Oil Scheduling Many of these models have decomposable structures v 2-stage stochastic programming problems § Planning and Scheduling models § Engineering design models § Models are large in size and hard to solve to global optimality v scaling issue GOAL: Develop an algorithm to globally optimize large-scale models by GOAL: exploiting decomposable structure Carnegie Mellon �
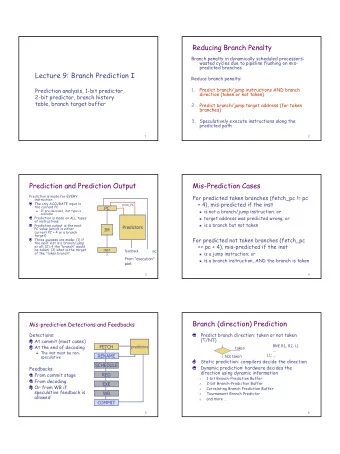
Problem Description N � min = ( , ) + ( , ) z s x y r u v n n n n = 1 � s . t . h ( u , v ) = 0 n = 1 , , N n n n � g ( u , v ) ≤ 0 n = 1 , , N n n n MINLP ′ � ( , , , ) = 0 = 1 , , h x y u v n N n n n ′ � ( , , , ) ≤ 0 = 1 , , g x y u v n N n n n Non-convex L U x ≤ x ≤ x model J ∈ { 0 , 1 } y L U � u ≤ u ≤ u n = 1 , , N n n n (P) m � ∈ { 0 , 1 } v = 1 , , v n n N n m I u x ∈ R , u ∈ R n n Linking constraints Non-Linking Constraints Constraints for q I + J + m + m q m + m ′ u v g ′ Link together : → g R n n R n : u v → g g R n n R n n n separate sub-models q + + + I J m m ′ ′ q : u v → h m + m h R R n n n sub-models : u v → h h R n n R n n n Linking Variables Non-Linking Variables { } � = [ ] = 1 , , x x i I u n 1 � i n = , , N { } v � Binary variables y = [ y ] j = 1 , , J n = 1 � n , , N j Carnegie Mellon �
Optimization of MINLP model Models are large and often difficult to solve to global optimality Direct application of deterministic global optimization Computationally inefficient algorithms ( spatial branch and bound ) not effective Major reason: Weak lower bounds from MI(N)LP relaxation of (P) constructed with convex envelopes Alternative approach: Lagrangean Decomposition Exploit decomposable structure of the large-scale model § Carnegie Mellon �
Model Reformulation How to bring (P) to decomposable form ? Create N identical copies of the linking variables v 1 2 N � { x , x , , x } Duplicate variables 1 2 N � { , , , } y y y Write linking constraints in (P) in terms of Duplicate Variables v Introduce Coupling constraints into model (P) v 1 2 N � = = = x x x 1 2 N � = = = y y y N N � � RP n n min = ( , ) + ( , ) z w s x y r u v n n n n n = 1 n = 1 � . . ( , ) = 0 = 1 , , s t h u v n N n n n � g ( u , v ) ≤ 0 n = 1 , , N n n n n n ′ � h ( x , y , u , v ) = 0 n = 1 , , N n n n n n ′ � g ( x , y , u , v ) ≤ 0 n = 1 , , N n n n + 1 n n − = = � − x x 0 n 1 , , N 1 New coupling n n + 1 − = 0 = 1 , � , − 1 y y n N constraints L n U � x ≤ x ≤ x n = 1 , , N n J ∈ { 0 , 1 } = 1 , � , y n N L U � ≤ ≤ = 1 , , u u u n N n n n m ∈ { 0 , 1 } v = 1 , � , v n n N (RP) n N � m n I u x ∈ R , u ∈ R = 1 0 ≤ ≤ 1 n w w n n n n = 1 Carnegie Mellon �
Lagrangean Decomposition Dualize Coupling constraints v Multiply coupling constraints with Lagrange multipliers, transfer them to § objective function N N N − 1 N − 1 � � � � x y LRP n n T n n + 1 T n n + 1 = + + λ − + λ − min z w s ( x , y ) r ( u , v ) ( ) ( x x ) ( ) ( y y ) n n n n n n = = = = n 1 n 1 n 1 n 1 Lagrange Multipliers Obtain decomposable Lagrangean relaxation v N N N − 1 N − 1 � � � � x y + 1 + 1 LRP n n T n n T n n min = ( , ) + ( , ) + ( λ ) ( − ) + ( λ ) ( − ) z w s x y r u v x x y y n n n n n n n = 1 n = 1 n = 1 n = 1 = = � s . t . h ( u , v ) 0 n 1 , , N n n n � g ( u , v ) ≤ 0 n = 1 , , N n n n n n ′ = = � h ( x , y , u , v ) 0 n 1 , , N n n n n n ′ ( , , , ) ≤ 0 = 1 , � , g x y u v n N n n n L n U � ≤ ≤ = 1 , , x x x n N n J � y ∈ { 0 , 1 } n = 1 , , N L U � ≤ ≤ = 1 , , u u u n N n n n m v � v ∈ { 0 , 1 } n = 1 , , N n n (LRP) m n I ∈ , ∈ u x R u R n n Carnegie Mellon �
Model Decomposition Decomposed sub-problems (fixed multipliers) Smaller and easier to solve v � x x y y n n T n T n min = ( , ) + ( , ) + ( λ − λ ) ( ) + ( λ − λ ) ( ) z w s x y r u v x y � n n − 1 n n − 1 n n n n n � . . ( , ) = 0 s t h u v n n n � ( , ) ≤ 0 g u v � n n n � n n ′ h ( x , y , u , v ) = 0 � Globally Optimize n n n � n n ′ ( , , , ) ≤ 0 g x y u v each sub-model � n n n � = � n 1 , , N L n U to get solution x ≤ x ≤ x � � * n J z ∈ { 0 , 1 } y � n � L U ≤ ≤ u u u � n n n � m ∈ v v { 0 , 1 } n n � � m n I u x ∈ R , u ∈ R � n n (SP n ) x y y x λ 0 = 0 λ = λ 0 = 0 λ = 0 0 N N N � * LB Lower bound (Lagrangean Decomposition) : = z z n = 1 n Could use as a basis for B&B (Caroe and Schultz, 99) Carnegie Mellon �
Basic Ideas of Proposed Algorithm Combine Spatial branch and bound with Lagrangean decomposition v Strengthen MI(N)LP relaxation of (P) with Lagrangean cuts v Branch and Cut Algorithm At each node of search tree: Cut Generation : Solve to global optimality dual subproblems for one or more sets of multiplier values Lower Bound : Solve MIL(N)P relaxation with convexified Lagrangean cuts Upper Bound : Feasible solution to nonconvex model which is obtained by globally solving NLP with fixed integer variables Guaranteed to converge to global optimum given a tolerance ε between lower and upper bounds Carnegie Mellon �
Optimality based Cutting Planes Combine convex relaxations and Lagrangean decomposition v * Using solution (Globally optimal solution of subproblem (SP n )) derive cuts: z v n x x y y (C n ) * T T ≤ ( , ) + ( , ) + ( λ − λ ) ( ) + ( λ − λ ) ( ) z w s x y r u v x y − 1 − 1 n n n n n n n n n Note: nonconvex cut written in terms of original coupling variables Update Lagrange multipliers (Fisher, 1981) and generate more cuts v Carnegie Mellon �
Incorporation of Cutting Planes Add bound strengthening cuts to (P) and convexify resulting problem to get v MI(N)LP relaxation (R) N � R min = ( , ) + ( , ) z s x y r u v n n n = 1 n � s . t . h ( u , v ) = 0 n = 1 , , N n n n � ( , ) ≤ 0 = 1 , , g u v n N n n n ′ � ( , , , ) = 0 = 1 , , h x y u v n N n n n ′ � ( , , , ) ≤ 0 = 1 , , g x y u v n N n n n x x y y * T T � ≤ ( , ) + ( , ) + ( λ − λ ) ( ) + ( λ − λ ) ( ) = 1 , , z w s x y r u v x y n N − 1 − 1 n n n n n n n n n L U ≤ ≤ x x x J ∈ y { 0 , 1 } L U ≤ ≤ = � u u u n 1 , , N n n n m � ∈ { 0 , 1 } v = 1 , , v n n N n m I (R) ∈ , ∈ u x R u R n n Convexified functions (.) g (.) ≤ 0 ′ ′ (.) ≤ 0 s r (.) h (.) = 0 g h (.) = 0 n n n n n Solve model (R) to get a valid lower bound on the global optimum of (P) v Carnegie Mellon ��
Properties of Lagrangean Cuts Theorem 1. The Lagrangean cuts x x y y * T T (C n ) ≤ ( , ) + ( , ) + ( λ − λ ) ( ) + ( λ − λ ) ( ) z w s x y r u v x y − 1 − 1 n n n n n n n n n are valid, and do not cut off any portion of the MIP feasible region of MINLP model (P) Proposition 1. The lower bound obtained by solving MI(N)LP with cuts is at least as strong as the one obtained by solving the MILP relaxation (CR) obtained by convexifying the nonconvex terms Proposition 2. The lower bound obtained by solving MI(N)LP with cuts is at least as strong as the lower bound obtained from Lagrangean decomposition when all N sub-models are solved to global optimality. Remarks 1. Cuts can be generated by solving subproblems in parallel 2. Update Lagrange multipliers: extension of method by Fisher (1981) 3. Global solution of subproblems can be obtained with standard solvers (BARON) Carnegie Mellon ��
Recommend




More recommend
Explore More Topics
Stay informed with curated content and fresh updates.