2/26/2012 NASA/JPLs LEMUR Robot Multi-Limb Robots on Irregular - PDF document
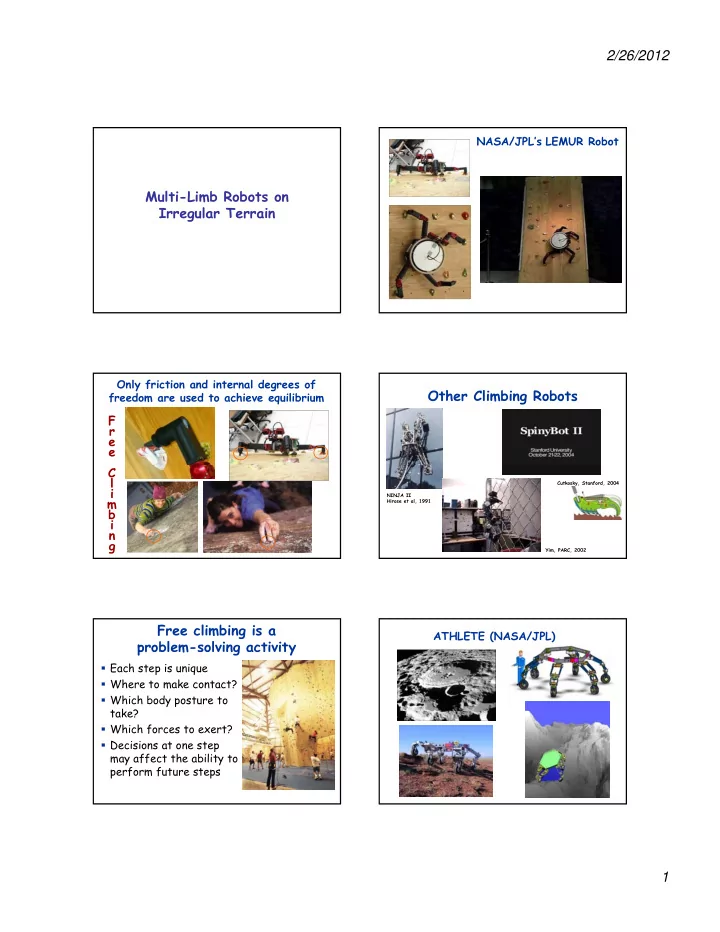
2/26/2012 NASA/JPLs LEMUR Robot Multi-Limb Robots on Irregular Terrain g Only friction and internal degrees of Other Climbing Robots freedom are used to achieve equilibrium F r e e C l Cutkosky, Stanford, 2004 i NINJA II m
2/26/2012 NASA/JPL’s LEMUR Robot Multi-Limb Robots on Irregular Terrain g Only friction and internal degrees of Other Climbing Robots freedom are used to achieve equilibrium F r e e C l Cutkosky, Stanford, 2004 i NINJA II m Hirose et al, 1991 b i n g Yim, PARC, 2002 Free climbing is a ATHLETE (NASA/JPL) problem-solving activity � Each step is unique � Where to make contact? � Which body posture to t k ? take? � Which forces to exert? � Decisions at one step may affect the ability to perform future steps 1
2/26/2012 HRP-2 (AIST, Japan) Motion-Before-Stances Approach Suitable when the terrain is mostly even and horizontal Stances-Before-Motion Approach Overview Overview goal goal goal goal � Given a terrain model and a goal location � Given a terrain model and a goal location � Compute a motion path to reach the goal � Compute a motion path to reach the goal waypoint 2 Sensing Planning Sensing Planning waypoint 1 waypoint 1 Execution non-gaited motion path candidate Robot contacts 9 10 Key Concept: Stance Inverse Kinematics Problem � Set of fixed robot- environment contacts � F σ : space of feasible robot configurations at stance σ 3-stance of LEMUR 3 stance of LEMUR 1. Contacts 2. Quasi-static equilibrium 3. No (self-)collision 4. Torques within bounds Feasible motion at 4-stance 2
2/26/2012 Forward Kinematics Inverse Kinematics θ 2 θ 2 d 2 d 2 (x,y) ( ,y) ( ,y) (x,y) d 1 d d 1 d x 2 + y 2 – d 1 2 – d 2 2 θ 2 = cos -1 2d 1 d 2 θ 1 θ 1 x = d 1 cos θ 1 + d 2 cos( θ 1 + θ 2 ) y = d 1 sin θ 1 + d 2 sin( θ 1 + θ 2 ) -x(d 2 sin θ 2 ) + y(d 1 + d 2 cos θ 2 ) θ 1 = y(d 2 sin θ 2 ) + x(d 1 + d 2 cos θ 2 ) Inverse Kinematics More Complicated Example θ 2 (x,y) d 3 d 2 d 2 (x,y) ( ,y) θ 3 θ d d 1 d 1 d x 2 + y 2 – d 12 – d 22 θ 2 = cos -1 2d 1 d 2 θ 1 � Redundant linkage -x(d 2 sin θ 2 ) + y(d 1 + d 2 cos θ 2 ) � Infinite number of solutions θ 1 = � Self-motion space y(d 2 sin θ 2 ) + x(d 1 + d 2 cos θ 2 ) Two solutions More Complicated Example More Complicated Example θ 2 θ 2 (x,y) (x,y) d 3 d 3 d 2 d 2 θ θ 3 θ θ 3 d 1 d d d 1 θ 1 θ 1 3
2/26/2012 Equilibrium Constraint Challenge High-dimensional configuration � space C (11 LEMUR, 42 for ATHLETE, 36 for HRP-2, 16 for Stanford robot) C Many possible contacts, hence many F σ � stances CM backstep highstep lieback Equilibrium Test in 3D Equilibrium Test � Assuming infinite torque � Assuming infinite torque limits: limits: � � Center of mass above � � Center of mass above CM convex support polygon convex support polygon 4
2/26/2012 Transition Configuration Equilibrium Test � Assuming infinite torque limits: Zero force � � Center of mass above convex support polygon Lazy Search Lazy Search Lazy Search Lazy Search 5
2/26/2012 Lazy Search Lazy Search Lazy Search Configuration Sampling 1. Sample position/orientation of the chassis at random in restricted area 2 2. Solve IK for each limb S l IK f h li b making contact 3. Sample DOFs in free limb at random 4. Test equilibrium constraint 34 Need for Sensor Feedback 35 6
Recommend




More recommend
Explore More Topics
Stay informed with curated content and fresh updates.