
1 Translation and Scalling Matrice Translation o The translation - PDF document
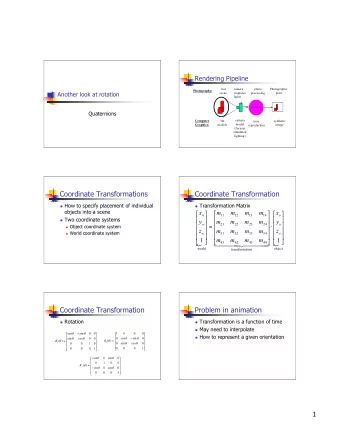
3D Coordinate Systems 3D Transformation o The translation, scaling and rotation transformations used for 2D o 3D computer graphics involves the additional dimension of can be extended to three dimensions depth, allowing more realistic
3D Coordinate Systems 3D Transformation o The translation, scaling and rotation transformations used for 2D o 3D computer graphics involves the additional dimension of can be extended to three dimensions depth, allowing more realistic representations of 3D objects in the real world o In 3D, each transformation is represented by a 4x4 matrix o There are two possible ways of “attaching” the Z-axis, which o Using homogeneous coordinates it is possible to represent each gives rise to a left-handed or a right-handed system type of transformation in a matrix form and integrate transformations into one matrix o To apply transformations, simply multiply matrices, also easier in hardware and software implementation o Homogeneous coordinates can represent directions o Homogeneous coordinates also allow for non-affine transformations, e.g., perspective projection Homogeneous Coordinates Basic 2D Transformations 1 0 b o In 2D, use three numbers to represent a point o Translation: x 0 1 b y (x,y) = (wx,wy,w) for any constant w ≠ 0 o 0 0 1 s 0 0 o To go backwards, divide by w, (x,y) becomes (x,y,1) x o Scaling: 0 s 0 y o Transformation can now be done with matrix multiplication 0 0 1 ′ x a a b x θ − θ cos sin 0 xx xy x ′ = y a a b y θ θ sin cos 0 o Rotation: yx yy y 0 0 1 1 0 0 1 1 1
Translation and Scalling Matrice Translation o The translation and scaling transformations may be represented in 3D as follows: 1 0 0 tr X Translation 0 1 0 tr Y original matrix 0 0 1 tr Z 0 0 0 1 S X 0 0 0 Scaling 0 S Y 0 0 matrix 0 0 S Z 0 0 0 0 1 V=(a i + b j +c k ) == (a, b, c) translation along y, or V = (0, k, 0) Scaling 3D Shearing Shearing: The change in each coordinate is a linear combination of all three Transforms a cube into a general parallelepiped Original scale all axes scale Y axis offset from origin ′ x 1 a b 0 x ′ x a 0 0 0 x ′ y c 1 d 0 y ′ = y 0 b 0 0 y ′ = z e f 1 0 z ′ z 0 0 c 0 z 1 0 0 0 1 1 1 0 0 0 1 1 2
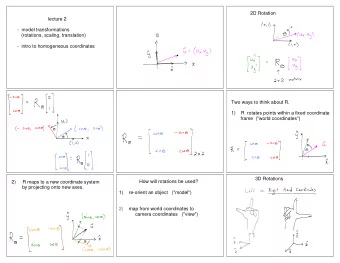
Rotation Major Axis Rotation Matrices o In 2D, rotation is about a point 1 0 0 0 θ − θ o about X axis 0 cos sin 0 = R o In 3D, rotation is about a vector, which can be done through x θ θ 0 sin cos 0 rotations about x, y or z axes 0 0 0 1 θ θ Rotations are cos 0 sin 0 o Positive rotations are anti-clockwise, negative rotations are o about Y axis orthogonal matrices, 0 1 0 0 clockwise, when looking down a positive axis towards the = R preserving distances and y − θ θ sin 0 cos 0 origin angles. 0 0 0 1 y y y o about Z axis θ − θ cos sin 0 0 θ θ x sin cos 0 0 x = x R z 0 0 1 0 z 0 0 0 1 z z Rotation Rotation Axis o In general rotation vector does not pass through origin rotation of 45 o about the Z axis offset from origin translation then rotate about Z axis 3
Rotation about an Arbitrary Axis Rotation about an Arbitrary Axis o Rotation about an Arbitrary Axis o Step 1. Translation Basic Idea Basic Idea y y 1. Translate (x 1 , y 1 , z 1 ) to the origin T 1. Translate (x 1 , y 1 , z 1 ) to the origin T − (x 2 ,y 2 ,z 2 ) (x 2 ,y 2 ,z 2 ) 1 0 0 x 2. Rotate (x’ 2 , y’ 2 , z’ 2 ) on to the z axis 1 2. Rotate (x’ 2 , y’ 2 , z’ 2 ) on to the z axis R − R 0 1 0 y 3. Rotate the object around the z-axis = 3. Rotate the object around the z-axis 1 T T − 4. Rotate the axis to the original (x 1 ,y 1 ,z 1 ) R 0 0 1 z (x 1 ,y 1 ,z 1 ) 4. Rotate the axis to the original 1 orientation 0 0 0 1 orientation R -1 R -1 x x 5. Translate the rotation axis to the 5. Translate the rotation axis to the z original position z original position T -1 T -1 = − − − 1 1 1 [ T ] [ T ] [ T ] [ T ] [ T ][ T ][ T ][ T ] ( ) ( ) ( ) ( ) ( ) α φ θ φ α R T R R R R R T arb R x y z y x R Rotation about an Arbitrary Axis Rotation about an Arbitrary Axis [ ] o Step 3. Rotate about y axis by φ o Step 2. Establish T ( α R ) x b b y y a d α = = φ = φ = sin sin , cos + 2 2 d l l b c = + + = + 2 2 2 2 2 2 l a b c a d c c (0,b,c) α = = cos (a,b,c) (a,b,c) = + + d 2 2 2 2 d b c b c l Projected Projected α φ − φ − α 1 0 0 0 1 0 0 0 cos 0 sin 0 d / l 0 a / l 0 Point Point [ ] [ ] α − α − d 0 cos sin 0 0 c / d b / d 0 0 1 0 0 0 1 0 0 x x = = φ = = T T ( ) α α α φ R ( ) R φ φ x 0 sin cos 0 0 b / d c / d 0 y sin 0 cos 0 a / l 0 d / l 0 (a,0,d) z 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 Rotated Rotated z Point Point 4
Rotation about an Arbitrary Axis Rotation about an Arbitrary Axis o Step 4. Rotate about z axis by the desired angle θ o Step 5. Apply the reverse transformation to place the axis back in its initial position y y 1 0 0 x 1 0 0 0 1 α α 0 1 0 y 0 cos sin 0 − − − = 1 1 1 1 [ T ] [ T ] [ T ] ( ) ( ) α φ θ − θ T R R − α α 0 0 1 z 0 sin cos 0 cos sin 0 0 R x y 1 l θ θ 0 0 0 1 0 0 0 1 [ ] sin cos 0 0 = T φ φ ( ) θ cos 0 sin 0 R z 0 0 1 0 0 1 0 0 l l x 0 0 0 1 x − φ φ θ sin 0 cos 0 0 0 0 1 z z = − − − 1 1 1 [ T ] [ T ] [ T ] [ T ] [ T ][ T ][ T ][ T ] ( ) ( ) ( ) ( ) ( ) α φ θ φ α R T R R R R R T arb R x y z y x R Rotation about an Arbitrary Axis Rotation about an Arbitrary Axis o Step1. Translate point A (2,1,0) to the origin Find the new coordinates of a unit cube 90º-rotated about an axis defined by its endpoints A(2,1,0) and B(3,3,1). y − 1 0 0 2 − 0 1 0 1 B’(1,2,1) = [ T ] T R 0 0 1 0 A’(0,0,0) x 0 0 0 1 z 5
Recommend





More recommend
Explore More Topics
Stay informed with curated content and fresh updates.