1 7 8 ARL Robot Sense Plan Move Goal 9 10 Sense Plan Move - PDF document
Motion planning is the ability for an agent to CS26N: Motion Planning compute its own motions in order to achieve for Robots, Digital Actors, and certain goals. All autonomous robots and digital Other Moving Objects actors should eventually
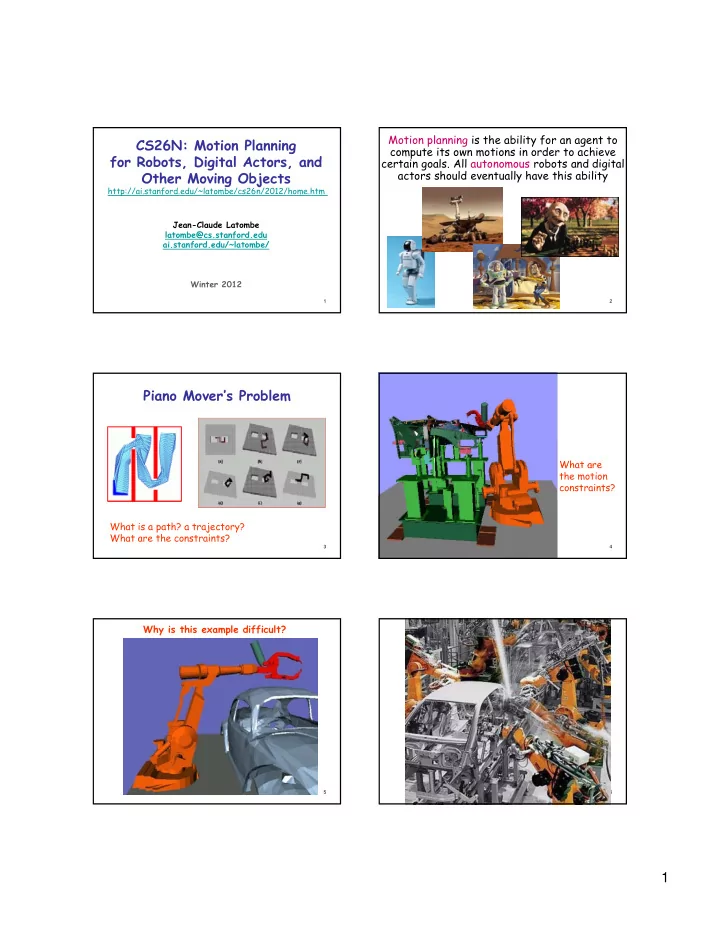
Motion planning is the ability for an agent to CS26N: Motion Planning compute its own motions in order to achieve for Robots, Digital Actors, and certain goals. All autonomous robots and digital Other Moving Objects actors should eventually have this ability http://ai.stanford.edu/~latombe/cs26n/2012/home.htm Jean-Claude Latombe latombe@cs.stanford.edu ai.stanford.edu/~latombe/ Winter 2012 1 2 Piano Mover’s Problem What are What are the motion constraints? What is a path? a trajectory? What are the constraints? 3 4 Why is this example difficult? 5 6 1
7 8 ARL Robot Sense Plan Move Goal 9 10 Sense Plan Move Motion Learn library 11 12 2
Goal of Motion Planning Sense Plan Move • Compute motion strategies , e.g.: – geometric paths Motion Learn – time-parameterized trajectories library – sequence of sensor-based motion commands sequence of sensor based motion commands • To achieve high-level goals , e.g.: – go to A without colliding with obstacles – assemble product P – build map of environment E – find object O 13 14 Fundamental Question Fundamental Question Are two given points connected by a path? Are two given points connected by a path? E.g.: ▪ Collision with obstacle ▪ Lack of visibility of an object ▪ Lack of stability Valid region Valid region Forbidden region Forbidden region 15 16 Tool: Configuration Space Is It Easy? Problems: • Geometric complexity • Space dimensionality 17 18 3
Continuous space Many Variants C-space • Moving obstacles • Optimal planning Discretization • Multiple robots • Uncertainty in model, control and sensing • Movable objects • Exploiting task • Assembly planning mechanics (sensorless • Goal is to acquire motions under- motions, under information by sensing i f ti b i actualted systems) – Model building • Physical models and – Object finding/tracking deformable objects – Inspection • Integration of planning • Nonholonomic Sampling-based Criticality-based and control constraints • Integration with higher- • Dynamic constraints level planning • Stability constraints Search 19 20 Humanoid Robots Some Applications HRP-2, AIST, Japan 21 22 Lunar Vehicle (ATHLETE, NASA/JPL) Climbing Robot 24 23 4
Modular Reconfigurable Robots 25 26 Manipulation of Deformable Dexterous Manipulation Objects Topologically defined goals 27 28 Digital Characters Digital Characters Toy Story (Pixar/Disney) Antz (Dreamworks) A Bug’s Life (Pixar/Disney) 29 30 Tomb Raider 3 (Eidos Interactive) The Legend of Zelda (Nintendo) Final Fantasy VIII (SquareOne) 5
Animation of Crowds 31 32 Design for Manufacturing Design for Manufacturing and Servicing and Servicing 33 34 Cable Harness/ Pipe design Design for Manufacturing and Servicing 35 36 6
Navigation Through Virtual Map Building Environments Where to move next? 37 38 Virtual Angiography / Radiosurgical Planning Bronchoscopy / Colonoscopy CyberKnife (Accuray) 39 40 Egress Simulation Building Code Verification Primary escape route Potential congesting areas Secondary escape route 41 42 24-inch turning radius 9-inch turning radius 7
Transportation of A380 Study of Fuselage through Small Villages Motion of Bio-Molecules 43 44 Kineo Study of Motion of Bio-Molecules http://ai.stanford.edu/~latombe/cs26n/2012/home.htm 45 46 Inhibitor binding to HIV protease 8
Recommend







More recommend
Explore More Topics
Stay informed with curated content and fresh updates.