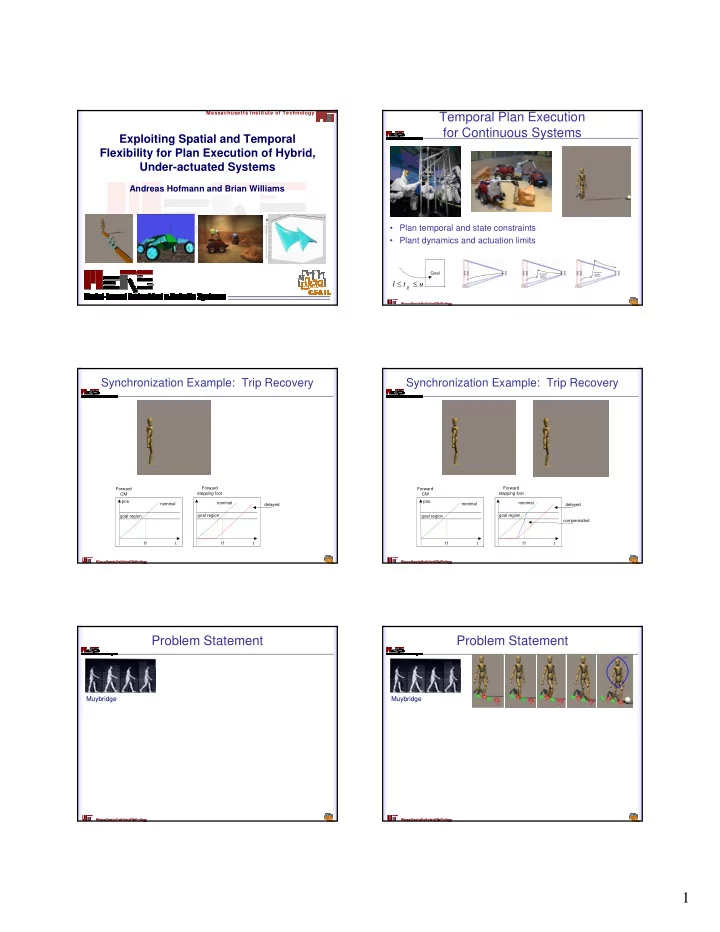
Massachusetts Institute of Technology Temporal Plan Execution for Continuous Systems Exploiting Spatial and Temporal Flexibility for Plan Execution of Hybrid, Under-actuated Systems Andreas Hofmann and Brian Williams y t & y • Plan temporal and state constraints • Plant dynamics and actuation limits Goal Disturbance Disturbance displaces displaces trajectory trajectory ≤ g ≤ l t u Synchronization Example: Trip Recovery Synchronization Example: Trip Recovery Forward Forward Forward Forward stepping foot stepping foot CM CM pos. pos. nominal nominal nominal nominal delayed delayed goal region goal region goal region goal region compensated t1 t1 t1 t1 t t t t Problem Statement Problem Statement Muybridge Muybridge start [t_lb, t_ub] finish CM cm ∈ cm 1 left left lf ∈ toe-off heel-strike l 1 Left lf ∈ l 2 Foot right right rf ∈ toe-off heel-strike r 1 Right Foot rf ∈ r 2 rf ∈ r 2 1
Problem Statement Problem Statement Muybridge Muybridge start start [t_lb, t_ub] finish finish [t_lb, t_ub] CM CM cm ∈ cm ∈ cm 1 cm 1 left left left left Qualitative Qualitative lf ∈ toe-off heel-strike lf ∈ toe-off heel-strike l 1 l 1 State Plan State Plan Left Left lf ∈ lf ∈ l 2 l 2 Foot Foot right right right right toe-off heel-strike rf ∈ rf ∈ toe-off heel-strike r 1 r 1 Right Right Foot rf ∈ Foot rf ∈ r 2 r 2 rf ∈ rf ∈ r 2 r 2 Problem Statement Problem Statement Muybridge Muybridge start start finish finish [t_lb, t_ub] [t_lb, t_ub] CM CM cm ∈ cm ∈ cm 1 cm 1 left left left left Qualitative Qualitative lf ∈ toe-off heel-strike lf ∈ toe-off heel-strike l 1 l 1 State Plan State Plan Left Left lf ∈ lf ∈ l 2 l 2 Foot Foot right right right right rf ∈ toe-off heel-strike rf ∈ toe-off heel-strike r 1 r 1 Right Right Foot rf ∈ Foot rf ∈ r 2 r 2 rf ∈ rf ∈ r 2 r 2 Problem Statement Problem Statement Muybridge Muybridge start start finish finish [t_lb, t_ub] [t_lb, t_ub] CM CM cm ∈ cm ∈ cm 1 cm 1 left left left left Qualitative Qualitative lf ∈ toe-off heel-strike lf ∈ toe-off heel-strike l 1 l 1 State Plan State Plan Left Left lf ∈ lf ∈ l 2 l 2 Foot Foot right right right right rf ∈ toe-off heel-strike rf ∈ toe-off heel-strike r 1 r 1 Right Right Foot rf ∈ Foot rf ∈ r 2 r 2 rf ∈ rf ∈ r 2 r 2 2
Problem Statement Problem Statement Muybridge Muybridge start start [t_lb, t_ub] finish [t_lb, t_ub] finish CM CM cm ∈ cm ∈ cm 1 cm 1 left left left left Qualitative Qualitative lf ∈ toe-off heel-strike lf ∈ toe-off heel-strike l 1 l 1 State Plan State Plan Left Left lf ∈ lf ∈ l 2 l 2 Foot Foot right right right right toe-off heel-strike toe-off heel-strike rf ∈ rf ∈ r 1 r 1 Right Right Foot rf ∈ Foot rf ∈ r 2 r 2 rf ∈ rf ∈ r 2 r 2 Compute u such that resulting state ( ) trajectory satisfies plan ( ) Plant Plant & = & = x f x, u x f x, u -state constraints u ? u ? CM ( ) CM ( ) -temporal constraints des ≤ des ≤ h x, u 0 h x, u 0 Key Innovations Problem Statement – Achieve state-space and temporal goals specified in plan – Achieve robustness by exploiting plan flexibility Temporal plan – Detect plan failure as early as possible executive Go forward Planner at 1 m/s A B Dispatcher [20, 30] Skills Library Turn right, C go forward D • Challenges CM – High dimensionality – Actuation limits f – Interaction of limits from plan gr f vert f with limits of plant horz Base of support ZMP Key Innovations Key Innovations High impedance Temporal plan Temporal plan tracking executive executive Go forward Go forward Planner Planner at 1 m/s at 1 m/s A B A B Dispatcher Dispatcher [20, 30] [20, 30] Skills Skills Library Library Turn right, Turn right, C D C go forward D go forward Left knee t Left hip pitch t Robust to temporal disturbances Robust to temporal disturbances Takes continuous dynamics into account Ignores continuous dynamics Ignores continuous dynamics Not flexible to disturbances 3
Key Innovations Roadmap • Introduction High impedance Model-based executive Temporal plan tracking – Problem statement, innovations executive Takes continuous • Background and approach dynamics into account – Temporal plan execution systems Go forward Uses plan flexibility to Planner at 1 m/s A B handle state and – Robot trajectory tracking systems Dispatcher [20, 30] temporal disturbances – Flow tubes Skills Library Turn right, • Architecture and implementation D C go forward Left knee t • Results Left hip pitch t • Summary Robust to temporal disturbances Takes continuous dynamics into account Ignores continuous dynamics Not flexible to disturbances Temporal plan execution systems Temporal Plan Execution Systems - Activity plan consists of events and activities. - Activity plan consists of events and activities. - Activities have temporal constraints. - Activities have temporal constraints. - Activity plan compiled into distance, dispatchable graph [Muscettola, 1998]. B B B B 1 1 8 8 [0,8] [1,1] [0,8] [1,1] 0 0 -1 -1 A C A C A C A C a. a. b. b. B B 1 1 8 8 0 0 -1 -1 9 9 A C A C -1 -1 c. c. Temporal plan dispatcher Temporal plan dispatcher 1. Initialize execution windows. 1. Initialize execution windows. [0,0] [1,10] [6,20] [0,0] [1,10] [6,20] 10 10 10 10 2. Schedule next event. a. T=0 a. T=0 A B C A B C - Set event execution time to valid time -1 -5 -1 -5 in window [0,0] [7,7] [12,17] [0,0] [7,7] [12,17] 3. Wait until event time. 10 10 10 10 b. T=7 b. T=7 A B C A B C -1 -5 -1 -5 Ex. Event time for B = 7 [0,0] [7,7] [15,15] [0,0] [7,7] [15,15] 10 10 10 10 c. c. T=15 T=15 A B C A B C -1 -5 -1 -5 4
Temporal plan dispatcher Temporal plan dispatcher 1. Initialize execution windows. [0,0] [1,10] 1. Initialize execution windows. [0,0] [1,10] [6,20] [6,20] 10 10 10 10 2. Schedule next event. 2. Schedule next event. a. a. T=0 T=0 A B C A B C - Set event execution time to valid time - Set event execution time to valid -1 -5 -1 -5 in window time in window [0,0] [7,7] [0,0] [7,7] [12,17] [12,17] 3. Wait until event time. 3. Wait until event time. 10 10 10 10 b. T=7 b. T=7 4. Update execution windows. A B C A B C 4. Update execution windows. -1 -5 -1 -5 5. If no more events, then done, else, go to 2. [0,0] [7,7] [15,15] [0,0] [7,7] [15,15] 10 10 10 10 c. T=15 c. T=15 A B C A B C -1 -5 -1 -5 High impedance ref. trajectory tracking High impedance ref. trajectory tracking Hirai, et al., 1998 Hirai, et al., 1998 Goal region ( ) q t Left knee Left knee t t Flow tube: all trajectories Left hip pitch Left hip pitch that satisfy plan goal - fully exploits plan t t flexibility - always know if state is feasible Takes continuous dynamics into account Takes continuous dynamics into account Not flexible to disturbances Not flexible to disturbances [Bradley and Zhao, 1993] [Frazzoli, 2000] Extend temporal plan execution Extend temporal plan execution • Extend to hybrid systems through use of flow tubes • Extend to hybrid systems through use of flow tubes • Begin with plan specifying temporal constraints for activities • Begin with plan specifying temporal constraints for activities S u b -s y s te m 1 A S u b -s y s te m 1 A 1 1 1 1 [1 0 0 , 2 0 0 ] [1 0 0 , 2 0 0 ] A A A A 2 1 2 2 2 1 2 2 [7 0 , 9 0 ] [5 0 , 1 0 0 ] [7 0 , 9 0 ] [5 0 , 1 0 0 ] S u b -s y s te m 2 S u b -s y s te m 2 [0 , 2 0 0 ] [0 , 2 0 0 ] • Add continuous state S u b -s y s te m 1 A constraints = 1 1 x g m in 2 0 0 0 1 = x g m a x 2 2 0 0 1 [1 0 0 , 2 0 0 ] (CM, foot placement) • Compute flow tubes A A = xg m in 1 5 0 0 2 1 2 2 2 = xg m ax 1 8 0 0 2 [7 0 , 9 0 ] [5 0 , 1 0 0 ] S u b -s y s te m 2 [0 , 2 0 0 ] 5
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries